Development of the interface to control ROMERIN
One of the great advantages of this project is that it has a graphical interface capable of communicating with any modular robot, in our case it will be for the hexapod robot ROMERIN.
Leer más
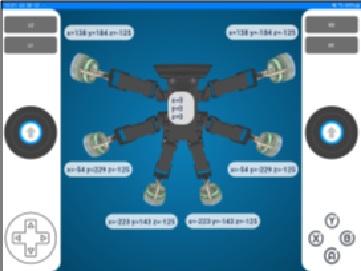
One of the great advantages of this project is that it has a graphical interface capable of communicating with any modular robot, in our case it will be for the hexapod robot ROMERIN.
Leer más
In order to find the best and most efficient model, various experimental tests were carried out which consisted in taking of measures with respect to the following parameters: atmospheric pressure, the revolutions per minute of the rotor and the consumption in amperes of the engine.
Leer más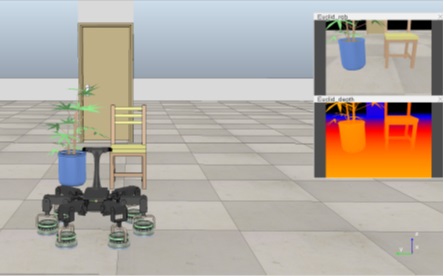
The main objective is to capture the robot in the mentioned simulator, giving it its characteristics. Since this robot will have the complex task of inspecting ducts with difficult or no access it is necessary that the simulated model responds correctly to the different unforeseen events that may be in its way.
Leer más