HUMAN-MACHINE
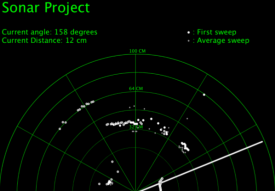
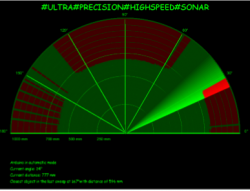
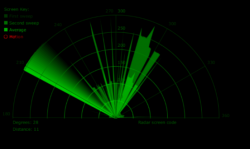
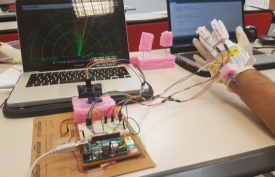
El objetivo del sistema es detectar la distancia entre una bisagra controlada manualmente, el entorno externo y proporcionar retroalimentación de audio (posición angular y distancia medida) cuando lo requiera el usuario. Además, en caso de que se perciba un “impacto” inminente, es decir, cuando se detecta un objeto a una distancia inferior a 10 cm, se utiliza un pequeño actuador para proporcionar al usuario una alarma basada en la vibración.
Leer más