SONAR SYSTEM
| Año académico | 2017 |
| Curso | Athens |
| Autores | Michiel Vanschoonbeek y Jonas Pelgrims. |
Documentación:
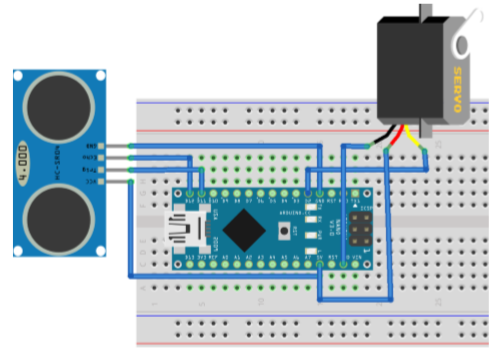
En este proyecto, se utilizó un módulo de alcance ultrasónico HC-SR04 y un Micro Servo SG90. El sensor ultrasónico está montado en la parte superior del servo. De esta manera, puede girar 180 grados. Al girar, el entorno se escanea y los datos se transfieren a una aplicación de usuario.
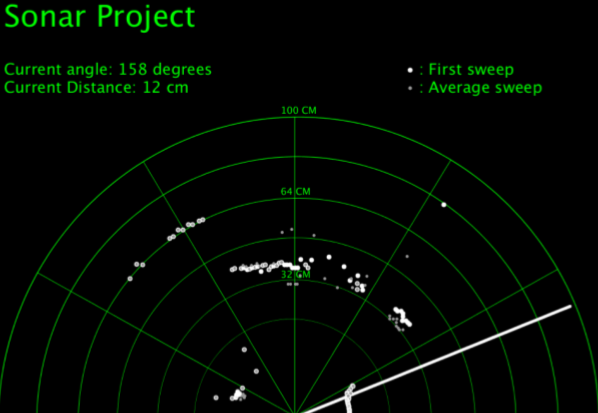
La aplicación está escrita en Processing. El propósito es visualizar los datos del sensor en un sistema de radar. El sensor gira 180 grados y se realiza una medición por ángulo. Al volver atrás, se combinan las mediciones correspondientes y se mejora la precisión. Esta característica es muy útil para entornos estáticos. Sin promediar las mediciones, algunos datos son inexactos. Si la primera medición es significativamente diferente de la segunda, los datos se descartan.