MINES PARISTECH
| Año académico | 2016 |
| Curso | Athens |
| Autores | Nils Holzenberger y Mathieu Prouveur. |
Documentación:
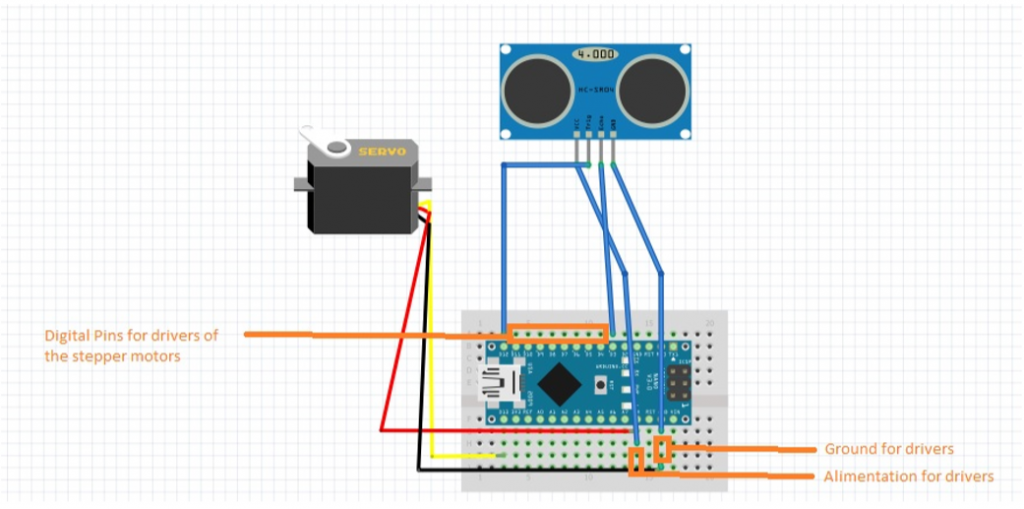
El proyecto es un robot que puede conducir y explorar su entorno. El robot puede ser controlado para avanzar y retroceder y girar alrededor de sí mismo sobre sus 2 ruedas. La función de exploración utiliza el sonar para medir la distancia al entorno en un semicírculo delante del robot. El proyecto utiliza un chip Arduino Nano, motores paso a paso y servomotores, un sonar, algunas piezas impresas en 3D y otros componentes mecánicos.