Inicio » Sin categoría
Archivos de la categoría: Sin categoría
Búsqueda inteligente de víctimas con robots
¿Puede un robot buscar víctimas en un entorno hostil como lo haría un humano?
Uno de los últimos avances desarrollados en el marco del proyecto TASAR, que tiene como objetivo el desarrollo de flotas de robots de distintas características para tareas de búsqueda y rescate de forma colaborativa, ha sido el TFM de Jorge F. García-Samartín –actualmente integrado en el grupo como estudiante de doctorado–, codirigido por Christyan Cruz Ulloa y Antonio Barrientos.
Haciendo uso de ARTU-R, un robot cuadrúpedo de elevada velocidad y alta capacidad de movimiento en entornos desestructurados, como lo son los escenarios posdesastre, se ha desarrollado un algoritmo inteligente de búsqueda de víctimas en regiones desconocidas, como pueden ser una casa en la que se ha producido una catástrofe natural o un laboratorio en que ha sufrido, por ejemplo, un escape de gases. La idea del mismo es conseguir, al llegar al entorno donde se necesita la intervención de los equipos de rescate, que ARTU-R lo recorra de forma similar a como lo haría un operador humano, priorizando la exploración de aquellas regiones en las que es más probable la presencia de una víctima.

Para ello, ARTU-R mapea el entorno haciendo uso de sus sensores láser y lídar. En paralelo, el sistema procesa las imágenes capturadas por medio de la cámara frontal, identificando en ella diversos objetos cotidianos (mesas, sillas, plantas…), y devuelve un valor que indica la probabilidad de que un humano se encuentre en un punto cercano. La información de ambas vías se fusiona y permite determinar el siguiente punto al que se dirigirá ARTU-R para continuar con su exploración.
Los diversos ensayos realizados, tanto en escenarios ad-hoc como reales (la planta baja del edificio del Centro de Automática y Robótica) muestran que el algoritmo alcanza velocidades de exploración similares a las mejores metodologías existentes en la literatura. En todas las pruebas, todas las víctimas fueron correctamente localizadas y en poco tiempo –lo que es fundamental en su supervivencia– lo que demuestra la validez del método y la riqueza que supone la colaboración humano-robot en tareas de búsqueda y rescate, puesto que permite alcanzar rendimientos similares –o incluso mejores– a los actuales minimizando considerablemente el riesgo de vidas humanas que estas actividades actualmente implican.
Un vídeo del sistema en funcionamiento puede verse en:
El pasado 25 de noviembre, el trabajo fue objeto del premio al mejor TFM en la séptima edición de los Premios Cátedra Ingeniero General D. Antonio Remón y Zarco del Valle. El galardón, una de las actividades de la cátedra UPM-CESEDEN, busca reconocer el trabajo realizado por profesores, investigadores y estudiantes en el ámbito de la defensa y la seguridad nacionales.

Avances en Robótica Blanda

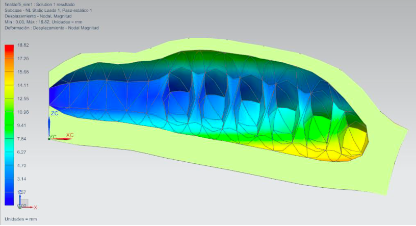
La robótica blanda (Soft Robotics), es un área que ha emergido con mucha fuerza e interés por sus potenciales aplicaciones, a la vez de por los retos que suponen su desarrollo que implica la investigación en el uso de nuevos materiales para la estructura del robot, de actuadores y sensores “blandos” y el empleo de técnicas avanzadas de control, que precisan mayor complejidad por la dificultad del modelado de la estructura blanda , a la vez que simplicidad para poder ser embebidos en el propio robot (¿Cómo ablandar a un robot?)
¿Retos complicados? ¡Pues a por ello! En el Robcib comenzamos hace tiempo a trabajar en los diferentes aspectos implicados en la robótica blanda.
Inicialmente (2015) hicimos algunos robots caminantes de silicona con accionamiento neumático, primero con un control en cadena abierta y luego en cadena cerrada
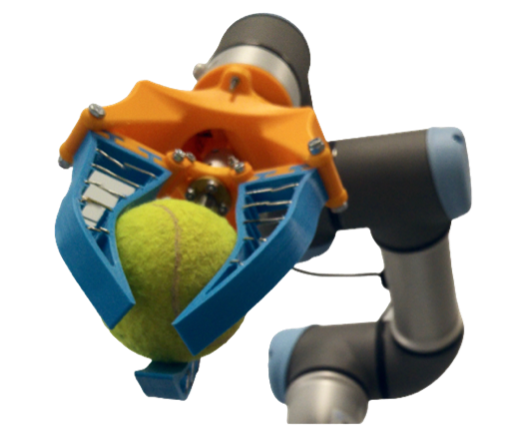
Mas adelante comenzamos a experimentar con las SMA (Aleaciones con memoria de forma) para hacer robots blandos de cables y también con motores convencionales, para mover diferentes tipos de robots, desde manipuladores hasta garras o exoesqueletos
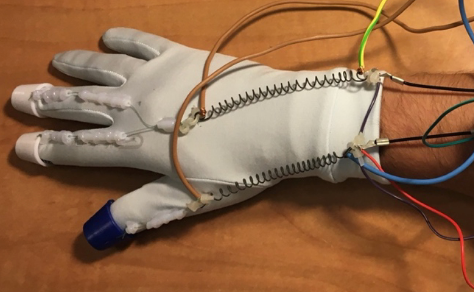
A continuación, se incluye una relación de desarrollos realizados en diferentes Trabajos de Fin de Titulación en los últimos años. Estos incluyen robots biomiométicos (medusas, estrellas de mar), guantes hápticos, exoesqueletos para rehabilitación de la mano, manipuladores formados por varios segmentos, etc.

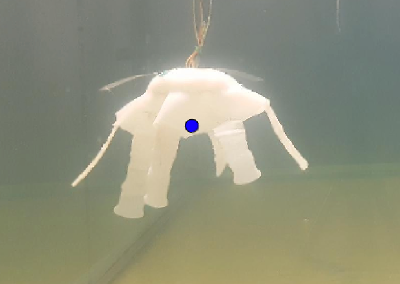


La tesis de Silvia Terrile da una cobertura bastante amplia a la investigación en Robótica blanda, mostrando varias realizaciones prácticas en particular con SMA (si no estas por leerte la tesis, puedes ver un super-resumen en este video)

Nuestros últimos trabajos se orientan a los Manipuladores neumáticos (Trabajo de Adrian Rieker), los Sensores integrados en la propia estructura (Trabajo de Jaime Bravo) o los robots Origami (Trabajo de Victoria Goncalves)

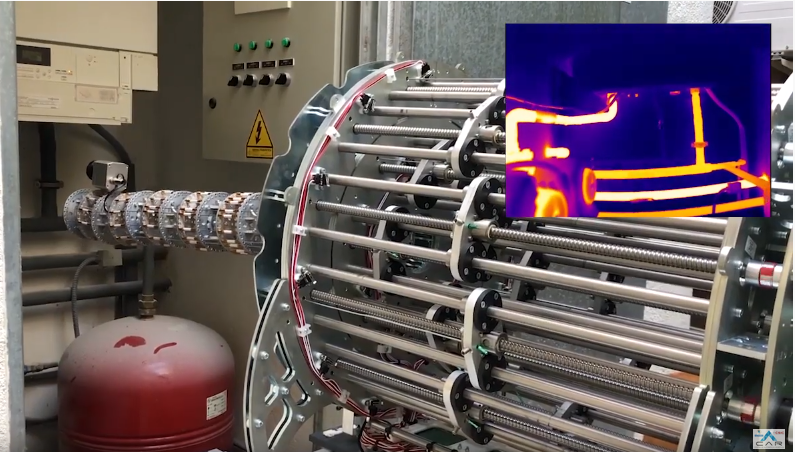
Localización de víctimas enterradas mediante imagen térmica

Ciertos desastres, naturales o provocados, originan el colapso de edificaciones con el consecuente enterramiento de personas.
Las brigadas de rescate tratan de localizar a las víctimas atrapadas entre escombros en el menor tiempo posible, pues el paso del tiempo disminuye las posibilidades de que las victimas sean encontradas con vida
Para ello se ayudan, entre otras cosas, de recursos técnicos, capturando información de tipo imagen en diferentes espectros (visual, térmico, etc.) , señales acústica y presencia de determinados gases.
En nuestro empeño de contribuir a estas misiones con el uso de robots, dentro del proyecto TASAR (Equipo de robots para misiones de búsqueda y rescate) , estamos trabajando en dotar a estos de determinados sensores y de algoritmos para que, con la información suministrada por estos, se localicen, de manera autónoma, las posibles víctimas enterradas parcial o totalmente.
En los trabajos realizados por Christyan, Guillermo y Guido (los podeis consultar aquí y aquí) , se utiliza la imagen térmica obtenida por una cámara térmica junto con las medidas de una cámara 3D infrarroja, ambas montada sobre nuestro robot Unitree A1, para construir mapas térmicos sobre los cuales, se identifican posibles victimas mediante redes neuronales

El trabajo de Guillermo Prieto (“Detección de víctimas mediante redes neuronales e imágenes térmicas”) , ha sido objeto de reconocimento por parte de la UPM-CESEDEN , que en la sexta edición de los premios “Cátedra Ingeniero General D. Antonio Remón y Zarco del Valle” le ha otorgado el premio al mejor Trabajo Fin de Grado para reconocer el trabajo realizado por profesores, investigadores y estudiantes de la UPM en temas tecnológicos relacionados con la defensa y la seguridad.

Simulador de robots con patas de tipo C
Un robot co patas de tipo C (CLEGS) tiene un modo de caminar que auna propiedades de la marcha con patas con la simplicidad de un solo actuador rotativo por cada una de ellas.
Hace unos años se hizo muy popular (al menos entre los foros robóticos) el robot RHEX desarrollado por varias universidades de EEUU con financiación del DARPA y finalmente trasvasado a Boston Dynamics.
En el ROBCIB tenemos nuestra propia versión: el CLHERO.
Dentro de los desarrollos que hemos realizado con él para conseguir su navegación autónoma, nos ha resultado imprescindible el poder utilizar las medidas de la Odometría dentro de los algoritmos de navegación. Debe tenerse en cuenta que la odometria de un robot con este tipo de patas, es muy diferente a la de un robot de ruedas diferenciales convencional.
Por ello, Jorge junto a Raúl, han tenido que desarrollar un simulador para robots con patas en forma de “C” en el entorno ROS+Gazebo y, casi seguro, que podemos confirmar que es el primero de estas características que puede usar cualquier desarrollador de forma abierta y gratuita.
Lo puedes ver aqui
y aquí
Este desarrollo se ha publicado en el volumen del ROS Book de agosto 2020 y esta accesible en github
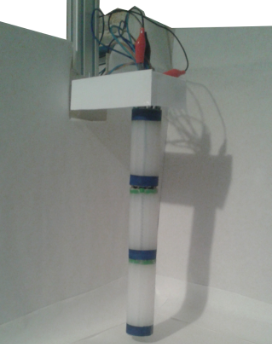
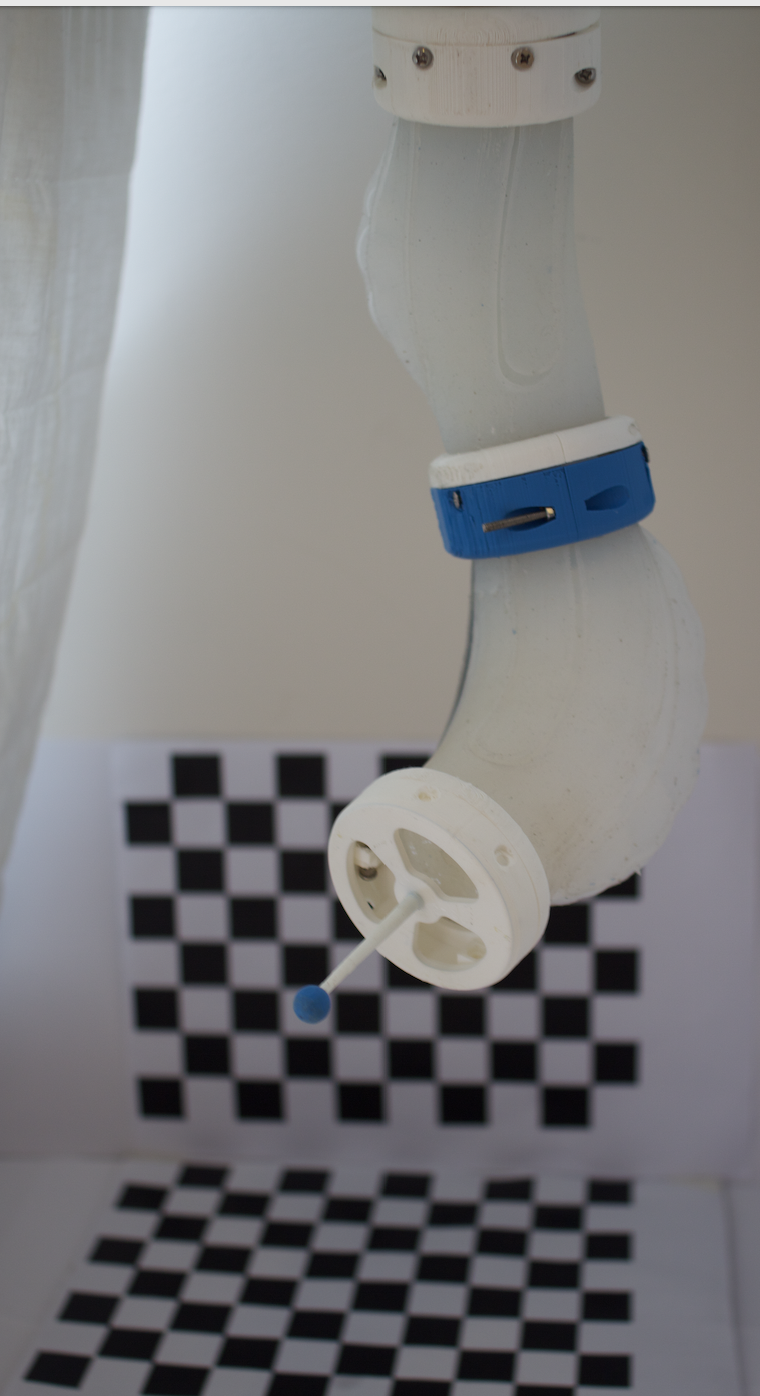
MACH-I . Un Robot como una trompa de elefante
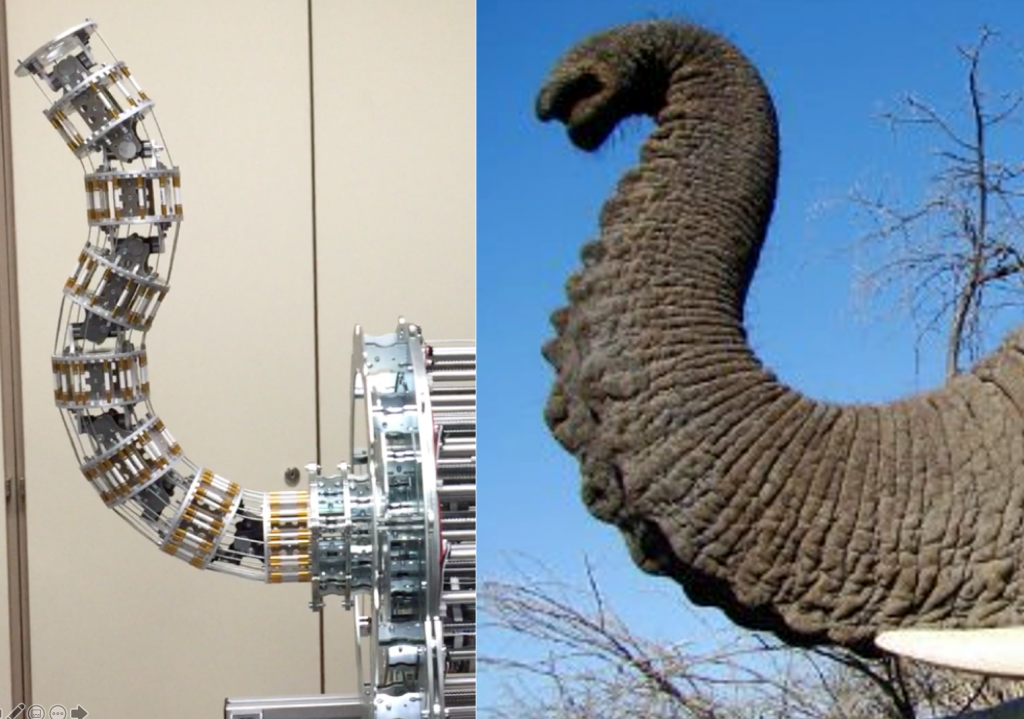
La trompa de un elefante es su apendice diestro. Con una capidad de maniobra increible es capaz de introducrise por lugares confinados y manipular objetos de diferentes formas.
Hacer un robot similar a la trompa de un elefante es tarea de la Robótica Bioinspirada basada en elementos y actuadores blandos (“Soft Robotics”).
Aún lejos de igualar sus prestaciones, los robots manipuladores hiperredundantes pueden lograr capacidades de movilidad que, cuanto menos, recuerdan a la referida trompa.
MACH I es el resultado de un Trabajo de fin de máster (de súper Ivan Rodríguez) realizado en el grupo de investigación de Robótica y Cibernética, dentro del proyecto del plan nacional PRIC (DPI2014-56985-R Protección robotizada de infraestructuras críticas). Entre los objetivos del mismo, se incluía el construir un robot hiper redundante funcional, adecuado para inspeccionar lugares muy confinados y realizar en ellos ciertas tareas de manipulación.

21 motores mueven, mediante cables, 7 segmentos conectados mediante juntas cardan. Al no tratarse de un robot serie, los movimentos de los motores deben estar sincronizados con mucha precisión. Tirar de un cable implica soltar de otros en la medida adecuada.
https://youtu.be/XbLFA1m5bRo
Tras la construcción del robot , el uso de la teleoperación y de la realidad aumentada aportada por Juan Jesús y Andrés , junto con algoritmos de cálculo de la cinematica inversa para robots hiper-redundantes y planificación de trayectorias ideados por Andrés, permiten sacar todo el partido al robot.
En la actualidad seguimos mejorando las prestaciones (David Marquez) e ideando nuevas soluciones constructivas (Elena Muñoz y Jaime Bravo)
Comentarios recientes