La robótica blanda (Soft Robotics), es un área que ha emergido con mucha fuerza e interés por sus potenciales aplicaciones, a la vez de por los retos que suponen su desarrollo que implica la investigación en el uso de nuevos materiales para la estructura del robot, de actuadores y sensores “blandos” y el empleo de técnicas avanzadas de control, que precisan mayor complejidad por la dificultad del modelado de la estructura blanda , a la vez que simplicidad para poder ser embebidos en el propio robot (¿Cómo ablandar a un robot?)
¿Retos complicados? ¡Pues a por ello! En el Robcib comenzamos hace tiempo a trabajar en los diferentes aspectos implicados en la robótica blanda.
Inicialmente (2015) hicimos algunos robots caminantes de silicona con accionamiento neumático, primero con un control en cadena abierta y luego en cadena cerrada
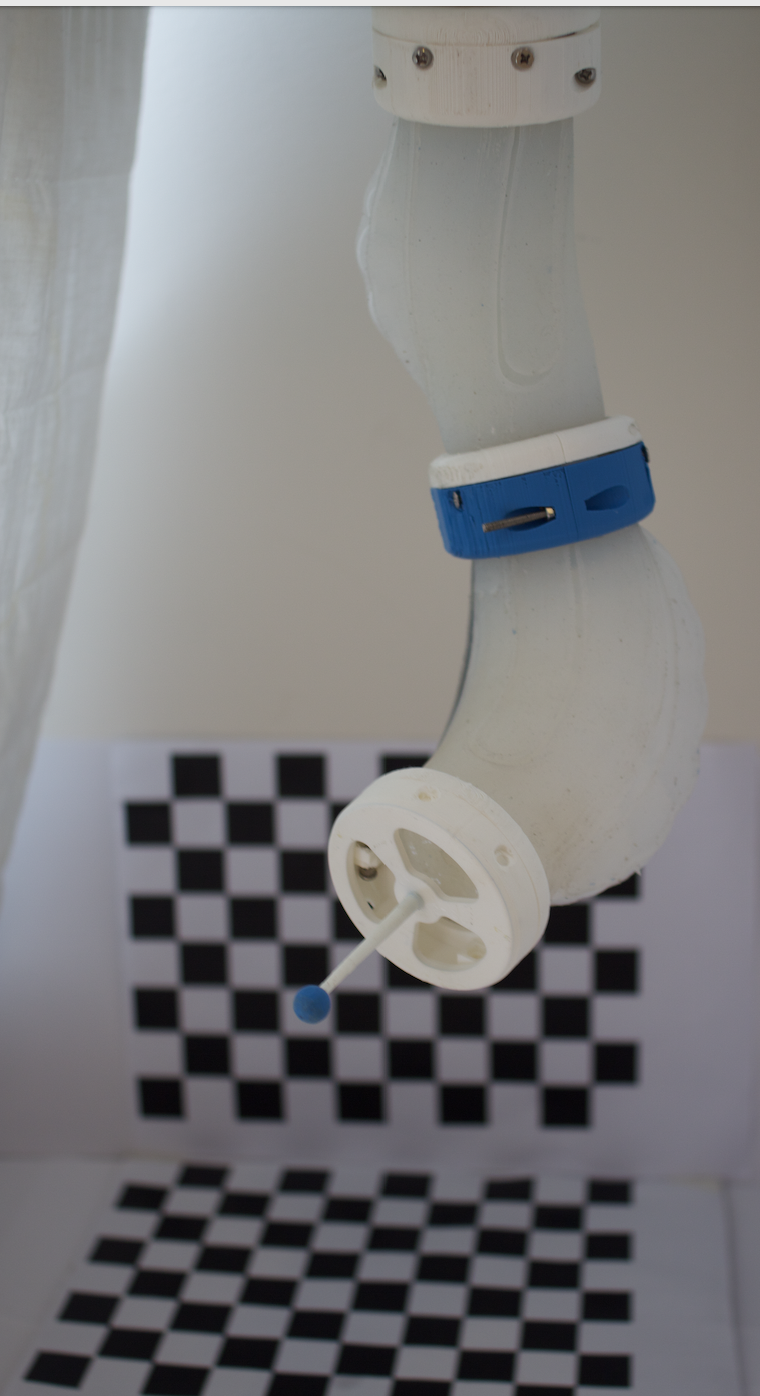
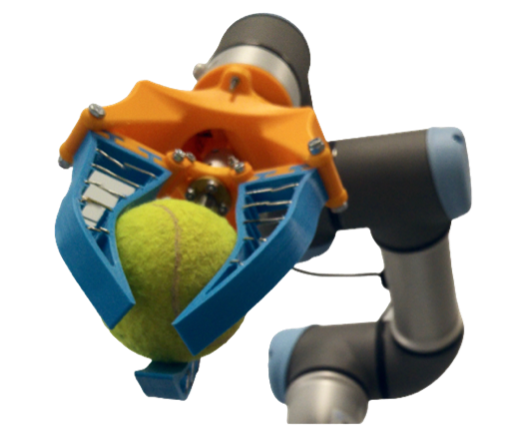
Mas adelante comenzamos a experimentar con las SMA (Aleaciones con memoria de forma) para hacer robots blandos de cables y también con motores convencionales, para mover diferentes tipos de robots, desde manipuladores hasta garras o exoesqueletos
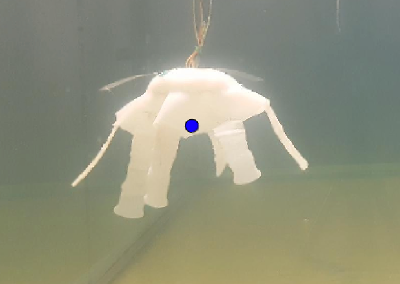
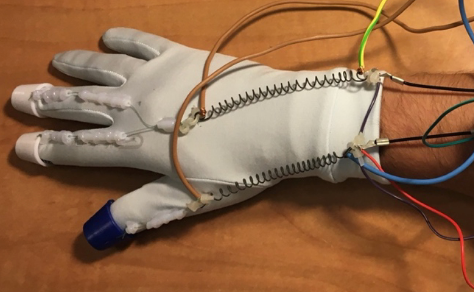
A continuación, se incluye una relación de desarrollos realizados en diferentes Trabajos de Fin de Titulación en los últimos años. Estos incluyen robots biomiométicos (medusas, estrellas de mar), guantes hápticos, exoesqueletos para rehabilitación de la mano, manipuladores formados por varios segmentos, etc.



La tesis de Silvia Terrile da una cobertura bastante amplia a la investigación en Robótica blanda, mostrando varias realizaciones prácticas en particular con SMA (si no estas por leerte la tesis, puedes ver un super-resumen en este video)

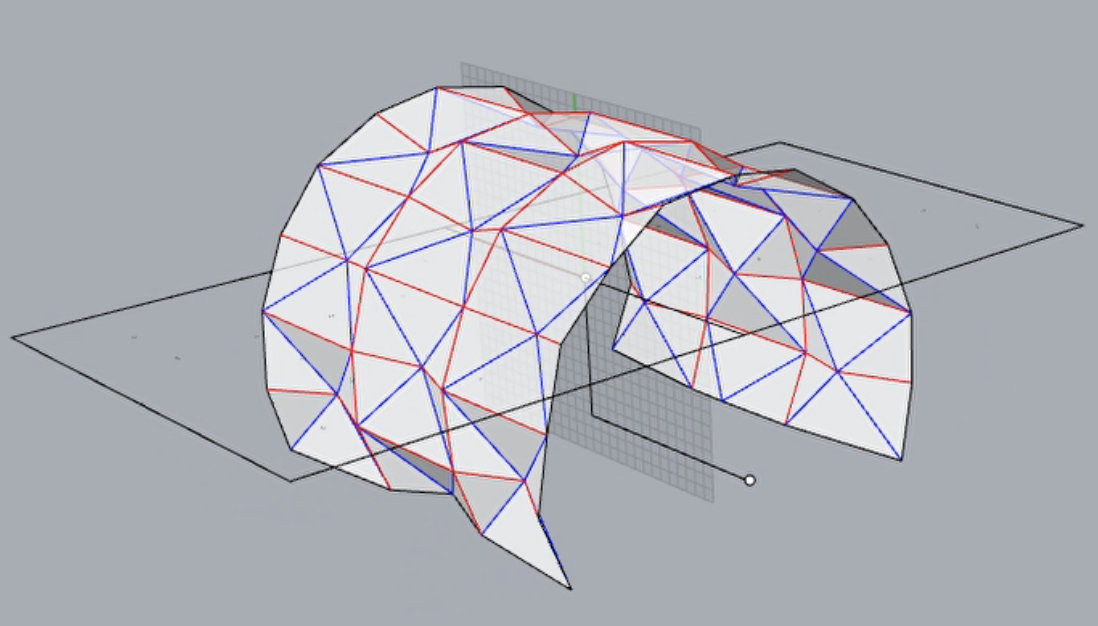
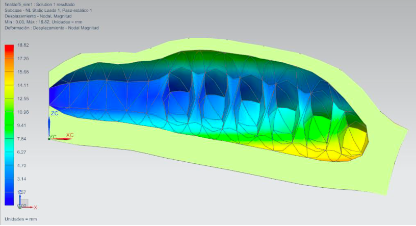
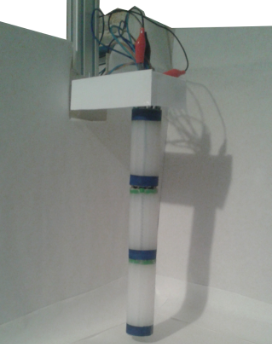
Nuestros últimos trabajos se orientan a los Manipuladores neumáticos (Trabajo de Adrian Rieker), los Sensores integrados en la propia estructura (Trabajo de Jaime Bravo) o los robots Origami (Trabajo de Victoria Goncalves)