Inicio » 2022
Archivos anuales: 2022
Búsqueda inteligente de víctimas con robots
¿Puede un robot buscar víctimas en un entorno hostil como lo haría un humano?
Uno de los últimos avances desarrollados en el marco del proyecto TASAR, que tiene como objetivo el desarrollo de flotas de robots de distintas características para tareas de búsqueda y rescate de forma colaborativa, ha sido el TFM de Jorge F. García-Samartín –actualmente integrado en el grupo como estudiante de doctorado–, codirigido por Christyan Cruz Ulloa y Antonio Barrientos.
Haciendo uso de ARTU-R, un robot cuadrúpedo de elevada velocidad y alta capacidad de movimiento en entornos desestructurados, como lo son los escenarios posdesastre, se ha desarrollado un algoritmo inteligente de búsqueda de víctimas en regiones desconocidas, como pueden ser una casa en la que se ha producido una catástrofe natural o un laboratorio en que ha sufrido, por ejemplo, un escape de gases. La idea del mismo es conseguir, al llegar al entorno donde se necesita la intervención de los equipos de rescate, que ARTU-R lo recorra de forma similar a como lo haría un operador humano, priorizando la exploración de aquellas regiones en las que es más probable la presencia de una víctima.

Para ello, ARTU-R mapea el entorno haciendo uso de sus sensores láser y lídar. En paralelo, el sistema procesa las imágenes capturadas por medio de la cámara frontal, identificando en ella diversos objetos cotidianos (mesas, sillas, plantas…), y devuelve un valor que indica la probabilidad de que un humano se encuentre en un punto cercano. La información de ambas vías se fusiona y permite determinar el siguiente punto al que se dirigirá ARTU-R para continuar con su exploración.
Los diversos ensayos realizados, tanto en escenarios ad-hoc como reales (la planta baja del edificio del Centro de Automática y Robótica) muestran que el algoritmo alcanza velocidades de exploración similares a las mejores metodologías existentes en la literatura. En todas las pruebas, todas las víctimas fueron correctamente localizadas y en poco tiempo –lo que es fundamental en su supervivencia– lo que demuestra la validez del método y la riqueza que supone la colaboración humano-robot en tareas de búsqueda y rescate, puesto que permite alcanzar rendimientos similares –o incluso mejores– a los actuales minimizando considerablemente el riesgo de vidas humanas que estas actividades actualmente implican.
Un vídeo del sistema en funcionamiento puede verse en:
El pasado 25 de noviembre, el trabajo fue objeto del premio al mejor TFM en la séptima edición de los Premios Cátedra Ingeniero General D. Antonio Remón y Zarco del Valle. El galardón, una de las actividades de la cátedra UPM-CESEDEN, busca reconocer el trabajo realizado por profesores, investigadores y estudiantes en el ámbito de la defensa y la seguridad nacionales.

Avances en Robótica Blanda

La robótica blanda (Soft Robotics), es un área que ha emergido con mucha fuerza e interés por sus potenciales aplicaciones, a la vez de por los retos que suponen su desarrollo que implica la investigación en el uso de nuevos materiales para la estructura del robot, de actuadores y sensores “blandos” y el empleo de técnicas avanzadas de control, que precisan mayor complejidad por la dificultad del modelado de la estructura blanda , a la vez que simplicidad para poder ser embebidos en el propio robot (¿Cómo ablandar a un robot?)
¿Retos complicados? ¡Pues a por ello! En el Robcib comenzamos hace tiempo a trabajar en los diferentes aspectos implicados en la robótica blanda.
Inicialmente (2015) hicimos algunos robots caminantes de silicona con accionamiento neumático, primero con un control en cadena abierta y luego en cadena cerrada
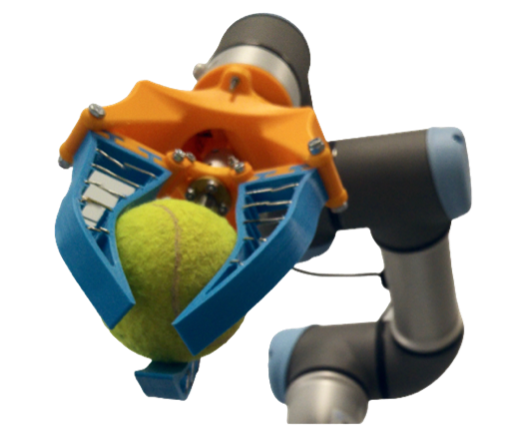
Mas adelante comenzamos a experimentar con las SMA (Aleaciones con memoria de forma) para hacer robots blandos de cables y también con motores convencionales, para mover diferentes tipos de robots, desde manipuladores hasta garras o exoesqueletos
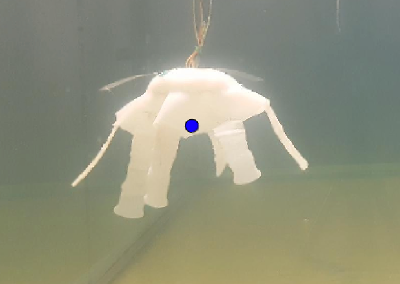
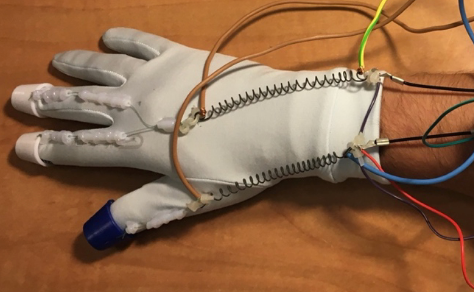
A continuación, se incluye una relación de desarrollos realizados en diferentes Trabajos de Fin de Titulación en los últimos años. Estos incluyen robots biomiométicos (medusas, estrellas de mar), guantes hápticos, exoesqueletos para rehabilitación de la mano, manipuladores formados por varios segmentos, etc.
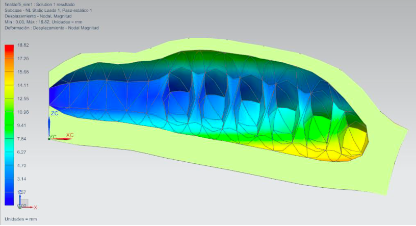



La tesis de Silvia Terrile da una cobertura bastante amplia a la investigación en Robótica blanda, mostrando varias realizaciones prácticas en particular con SMA (si no estas por leerte la tesis, puedes ver un super-resumen en este video)

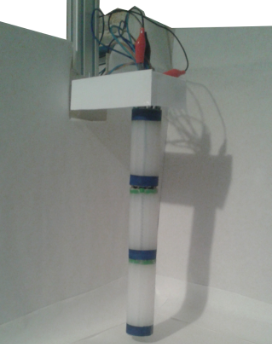
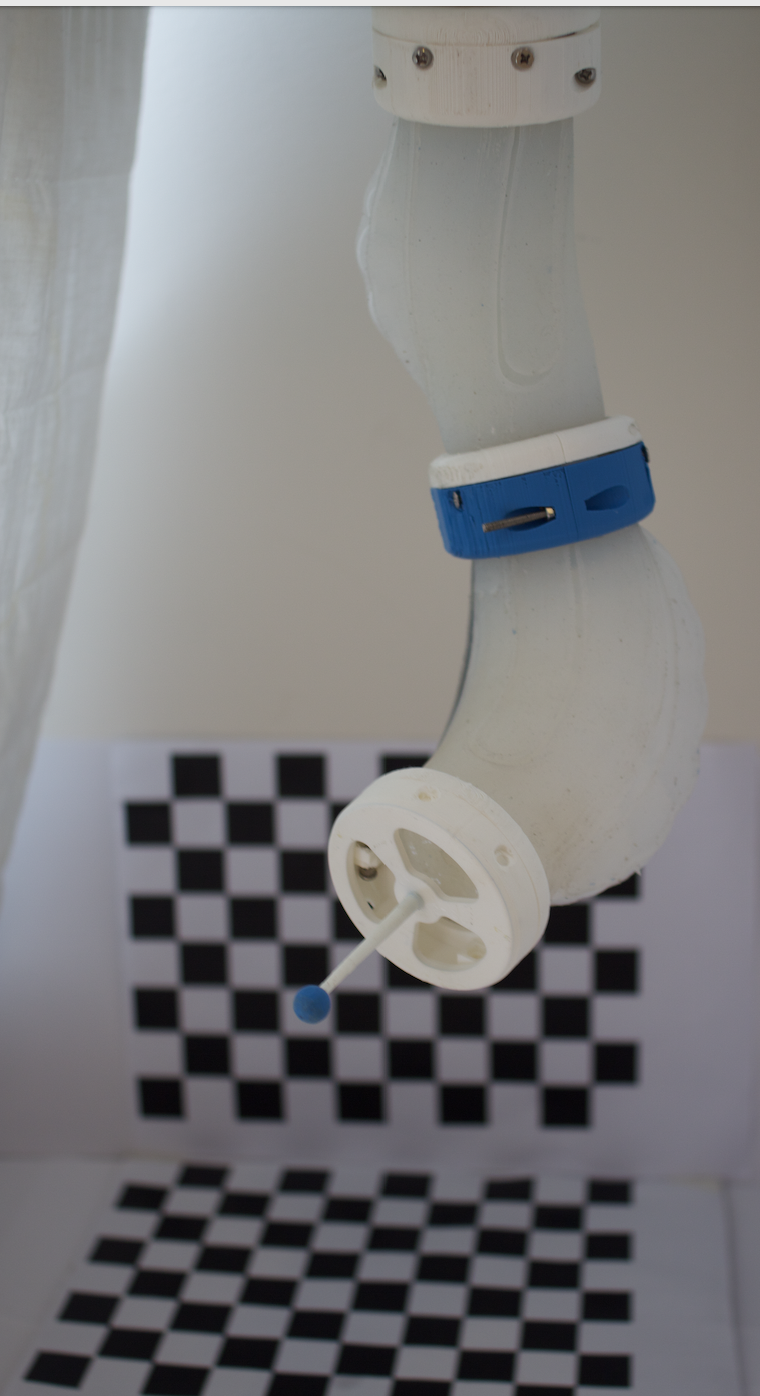
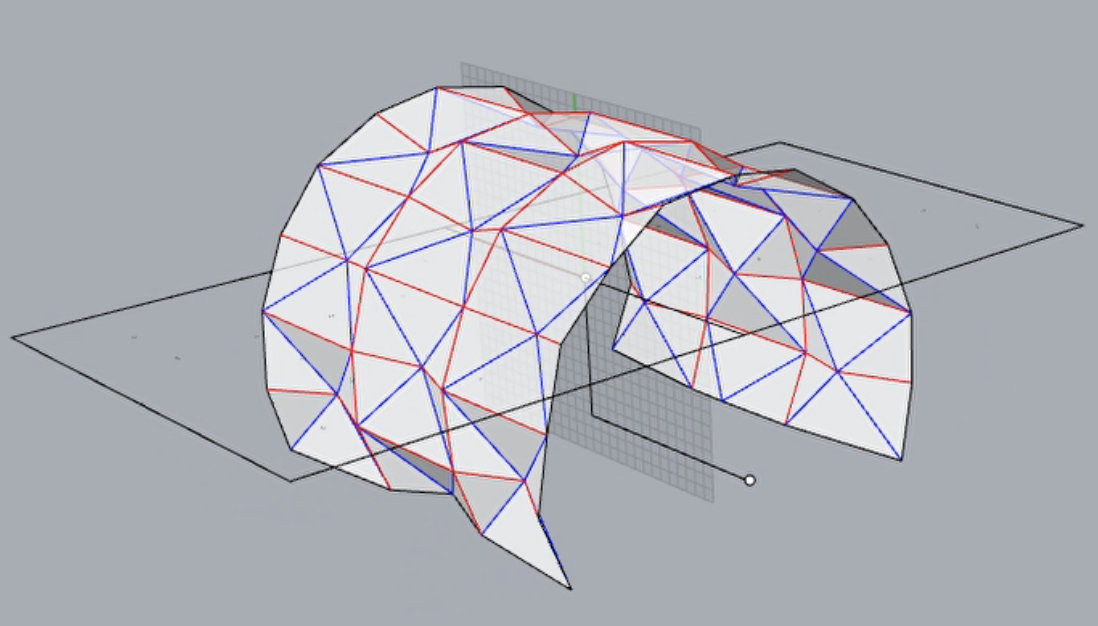
Nuestros últimos trabajos se orientan a los Manipuladores neumáticos (Trabajo de Adrian Rieker), los Sensores integrados en la propia estructura (Trabajo de Jaime Bravo) o los robots Origami (Trabajo de Victoria Goncalves)

Comentarios recientes