The concept of degree-of-freedom (DOF) is very important in all types of robots. It is the number of movements or independent parameters that define the pose of a robot. The word redundant is commonly used to mean “exceeding what is necessary or normal”. Robotic manipulators which have more independent DOFs than are required to perform a particular task are called hyper-redundant robots.
Some advantages of hyper-redundant robots against conventional ones are the fault tolerance in some of their joints, better skills to perform in complex environments and greater mechanical and kinematic capacities (such as lower energy consumption, greater transmissibility of force, joint range availability, dexterity or rigidity). In fact, there are a large number of applications for which they can be very useful such as service for underground tanks, supervision in nuclear core reactors, support in surgical systems or as an accessory in aeronautics and space exploration.
However, although hyper-redundant robots have been studied for more than three decades, its use is mostly limited to the experimental field. This is due to two main reasons. First, because a high number of degrees of freedom means a high cost of design and production. And secondly, because classical kinematic modeling techniques have not been particularly efficient or have not been adapted to the needs of hyper-redundant robots. This is why we have developed a novel algorithm called Natural-CCD to solve the kinematics of this robots in an efficient and precise way. Its name comes as a result of producing end-effector movements that are frequently found in nature such as the Fibonacci spiral.
In the context of hyper-redundant robots, two new concepts arise: Continuum robots and Soft robots. Continuum robots are continuously curving manipulators with an infinite number of virtual DOFs, much like the arm of an octopus. On the other hand, this kind of robots are closely related to another field called Soft Robotics. This robots are bio-inspired and try to make all of their components soft and flexible with the intention to move in a safe and versatile way. Currently, several concepts for soft and continuum manipulator robots are being designed and constructed. Its purpose is to be attached to a mobile robot and controlled by our new bio-inspired algorithms, being able to perform in activities such as supervising agriculture or detecting anomalies in critical infrastructures.
Different construction options are presently under evaluation
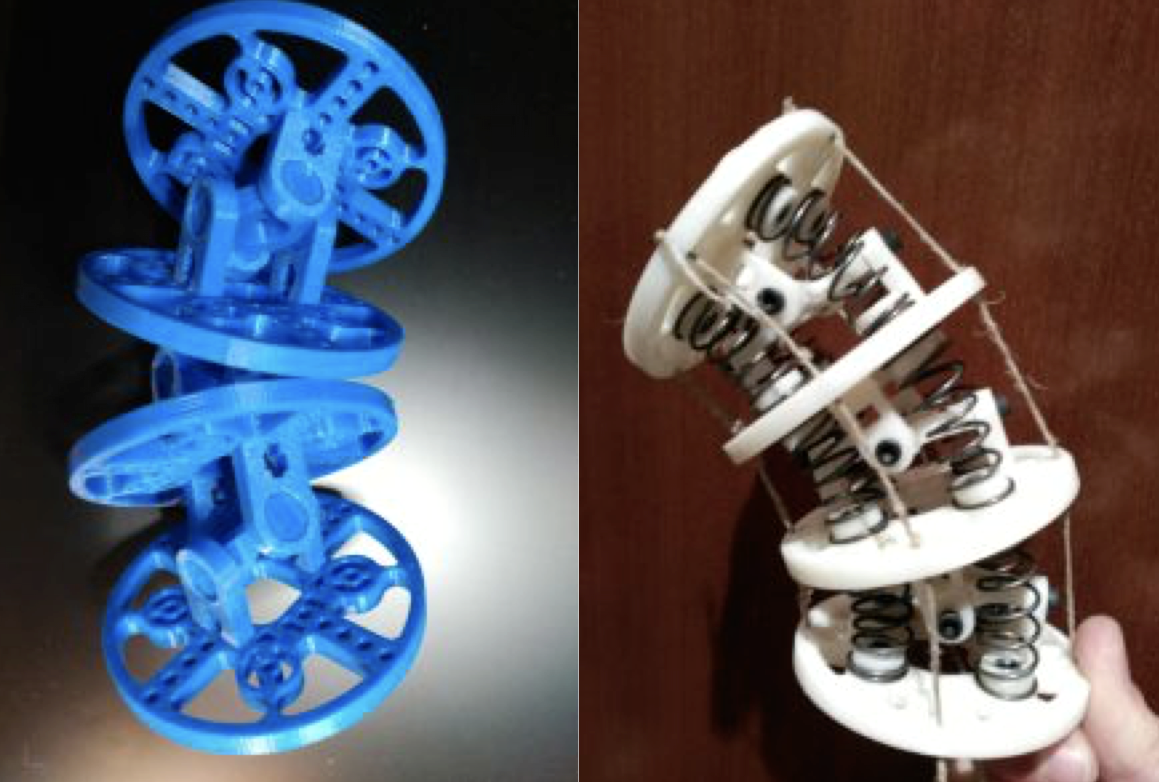
| The first is based on the concatenation of modules with multi-axis bending capability. A hyper-redundant robot is thus formed with the delocalized actuators through the use of cables to transmit the motion |
|
| A second version uses self-acting modules, each of which achieves movement on a single axis, but avoid the problems associated with cable transmission |
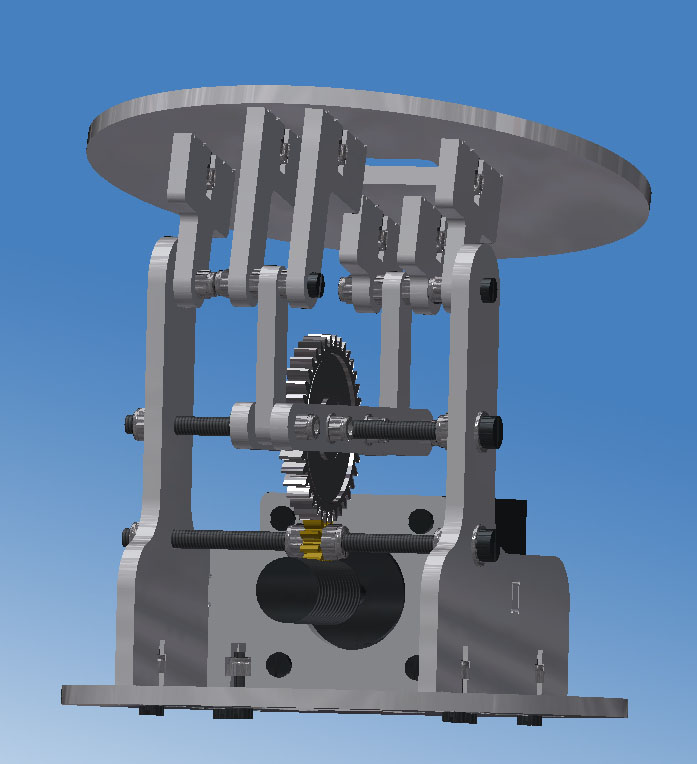
|
| The third option achieves a continuous robot, without rigid structure, being formed by elastic material that is deformed by the tension of cables located along its structure |

|