Agro-robótica

El término "Agrorobótica" está empezando a usar para hacer referencia a las disciplinas encaminadas al uso de sistemas robotizados en la agricultura. Estos incluyen maquinaria agrícola robotizada, robos móviles específicamente diseñados para tareas agrícolas en experiores o bajo cubierta, Robots aéreos o "Drones" (actualmente denominados RPAS)
Incluso, en algunas universidades europeas, están apareciendo cátedras en Agro-robótica, buscando dar una formación específica en esta disciplina
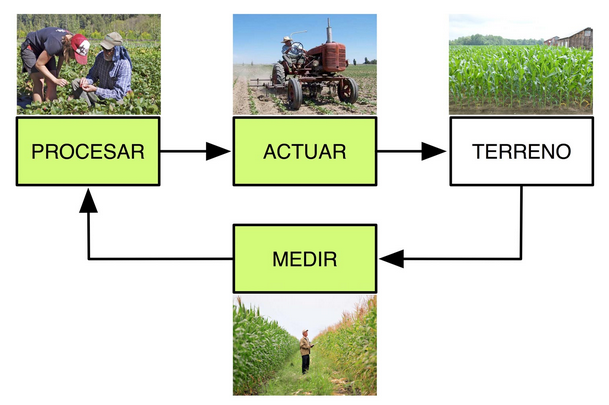
Desde el enfoque de la ingeniería de control , la Agro-robótica es una herramienta para aplicar el ciclo básico de control a la producción agrícola
En el Grupo de Robótica y Cibernética, trabajamos en Robótica Agrícola de exteriores e invernaderos desde hace 10 años, tanto con desarrollos basados en robótica aérea como en robótica móvil o combinando ambas
.
Estos son algunos ejemplos:
-
Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses
-
Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses
Hexápodo con patas “Clegs”
Nuestros trabajos en el desarrollo de robots hexápodos con Clegs siguen avanzando
En paralelo al estudio de esfuerzos en las diferentes geometrías de rueda y el análisis cinemático y dinámico , contrastado experimentalmente en el banco de pruebas, continuamos con la integración de los accionamientos bajo ROS y el mecanizado del chasis

Jesús Tordesillas ha trabajado a fondo este tema en su Trabajo fin de grado , donde se revisan aspectos relativos a los diferentes modos de marcha, el modelado cinemático y dinámico de las patas y la selección de la geometría y materiales de ésta según requisitos
Puedes encontrar mas información en el Archivo Digital de la UPM
Comentarios recientes