
Robots de Ruedas
 Características
Características
Es un robot de 12 kg, con 4 ruedas y 4 motores con encoders incrementales, además cuenta con un GPS y una IMU para la localización. Se puede implementar cámaras y sensores de proximidad. Cuenta con una Jetson Nano y una tarjeta teensy 3.6. Utiliza una arquitectura de control basada en ROS2.
Aplicaciones
 Características
Características
Es una plataforma móvil que se puede utilizar en interiores o exteriores gracias al tipo de ruedas. Cuenta con una cámara Pan-Tilt-Zoom, una imu y sensores de efecto hall en sus ruedas para la localización. Adicionalmente, tiene un brazo robótico Jaco de 6 GDL y una autonomía de 10 horas. Su arquitectura de control está basada en ROS integrado en Linux.
Aplicaciones
 Características
Características
Es una plataforma móvil que se puede utilizar en interiores o exteriores gracias al tipo de ruedas. Cuenta con una cámara Pan-Tilt-Zoom, una imu y sensores de efecto hall en sus ruedas para la localización y una autonomía de 10 horas. Adicionalmente, su arquitectura de control está basada en ROS integrado en Linux.
Aplicaciones
Robots de patas

Características
Es un robot cuadrúpedo, con varias funciones autónomas como caminar evitando obstáculos, puede seguir un objetivo fijado. Cuenta con sensores de presión en sus patas, sensores infrarrojos y una cámara de alta resolución. Para la localización cuneta con un GPS, IMU y sensores para obtener su odometría.
Aplicaciones
Robots de Orugas
Características
Es una plataforma móvil robusta, para interiores y exteriores con ruedas de orugas y cuatro brazos articulados que permiten dar mayor maniobra a la plataforma con terrenos variables y diferentes inclinaciones. Cuenta con varios sensores para la localización como una IMU, GPS, etc.
Aplicaciones
 Características
Características
Es una pequeña plataforma móvil tipo tanque con ruedas de orugas, que permite moverse en terreno con irregularidades, cuenta con varios sensores como un ultrasónico y una cámara en la parte superior.
Aplicaciones
Robots Manipuladores
 Características
Características
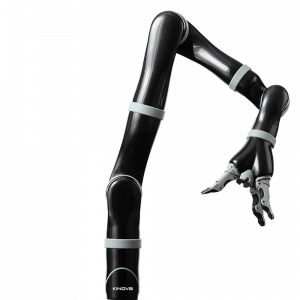
Es un brazo manipulador de 6 GDL de la empresa Kinova, cuenta con varios sensores de corriente y torque en sus motores, cuenta con una API en c++ para su control, y una arquitectura de control basada en ROS.