¿Ya visteis el episodio 3×06 de Black Mirror ("Odio Nacional") donde un enjambre de Autonomous Drone Insects (ADI) hacen de las suyas?

|
|
No temais, "aún" es ciencia ficción, pero en el Robcib llevamos tiempo trabajando en como gestionar estos enjambres y la información que podrían capturar sobre el estado de la ciudad. Monitorización de tráfico, gases, partículas en supensión, concentraciones de personas, acumulación de basuras,… todos estos datos podrian ser recogidos por montones de drones con comportamientos muy simples (acudir al lugar de mayor concetración de polen, alejarse de los puntos mas calientes, seguir objetos en movimiento de un color determinado,..). Cada uno de ellos daría poca información, pero la suma de lo que dan todos, adecuadamente tratada y visualizada, permitiría monitorizar el estado de la ciudad de una manera detallada.
No existen aún esos ADI de Black Mirror. Ni siquiera drones con el tamaño y autonomía de vuelo necesarios. Pero podemos construir una ciudad virtual , con sus horarios y rutinas diarias, clima, tráfico, etc. y hacer volar sobre ella un enjambre virtual que capta y transmite información básica.
Eso es SWARM CITY (la ciudad enjambre) sobre la que trabajan varios de los TFG, TFM y tesis del Robcib

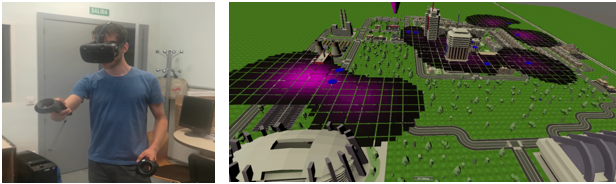
Javier Real, en concreto, ha presentado su TFG "Tratamiento y visualización de datos urbanos obtenidos por un enjambre de drones" en el que se desarrollan los algoritmos para agrupar la abundante información procedente de todos los drones a lo largo del tiempo, sintetizarla (mediante Procesos Gaussianos), descubrir aquellas situaciones que pueden ser de especial interés para el control de la ciudad (mediante Redes Neuronales) y localizarlas en el mapa de esta y mostrar todo ello al usuario mediante un Entorno inmersivo 3D de Realidad Virtual.
Comentarios recientes