E. Rosado María1
E.T.S. Arquitectura
Universidad Politécnica de Madrid.
- Introducción
- Superficies regladas
- Geometría de las superficies regladas
- Hiperboloide hiperbólico y paraboloide hiperbólico en Arquitectura
Referencias
1. Introducción
Cuando paseamos por nuestra ciudad, o visitamos otras, lo primero que suele llamarnos la atención son sus edificios más singulares. Desde la antigüedad, el ser humano ha creado obras arquitectónicas magníficas e impresionantes. Basta pensar en las pirámides de Egipto, el Partenón de Atenas, el Panteón de Roma, las majestuosas catedrales románicas y góticas, o, sin irnos tan lejos en el tiempo, los rascacielos cada vez más altos, como el imponente Burj Khalifa de Dubái, que alcanza los 828 metros de altura.
Toda obra arquitectónica debe cumplir con las tres condiciones que el arquitecto romano Vitruvio estableció hace más de dos mil años: firmitas, utilitas y venustas (firmeza, utilidad y belleza). En el caso de los edificios singulares, además de satisfacer estos tres principios, se busca también manifestar la capacidad técnica de su época y proyectar al mundo una imagen de innovación y poder.
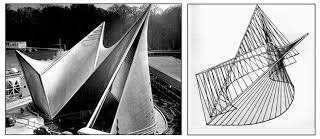
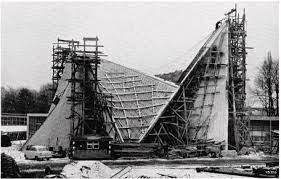
Nos trasladamos ahora a una época concreta —la mitad del siglo XX— para analizar dos obras especialmente significativas que marcaron un hito por la forma innovadora en que fueron concebidas: el Pabellón Philips para la Exposición Universal de Bruselas (1958) (Figura 1) y la Pagoda de los laboratorios JORBA (1965) (Figura 2). Ambos proyectos destacan, no solo por la audacia de sus diseños, sino también por los desafíos técnicos que se plantearon en su construcción y las ingeniosas soluciones estructurales que se propusieron. En ambas obras se manifiesta un profundo dominio de la geometría por parte de sus creadores, lo que las convierte en referentes de la arquitectura de su tiempo.

El Pabellón Philips fue una obra pionera en cuanto a diseño e innovación técnica. Concebido para la Exposición Universal de Bruselas de 1958, fue diseñado por el arquitecto y compositor Iannis Xenakis, en colaboración con Le Corbusier. Este singular edificio rompió con las formas arquitectónicas tradicionales mediante una estructura basada en paraboloides hiperbólicos. Su función era servir de escenario para el Poème électronique, una experiencia sensorial inmersiva que combinaba música, luz e imagen, creando un entorno multimedia inédito hasta entonces. Además de su potente carga simbólica y artística, el pabellón destacó por su enfoque estructural innovador: sus formas curvas, inspiradas en principios matemáticos y musicales, anticiparon el uso de geometrías complejas en la arquitectura contemporánea. Aunque fue desmontado al finalizar la exposición, su breve existencia dejó una profunda huella en la historia de la arquitectura por su fusión única entre arte, ciencia y tecnología.
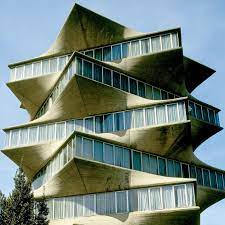
Por su parte, en el contexto español, una obra que sobresalió por su originalidad formal y técnica fue la Pagoda de los laboratorios JORBA, diseñada por Manuel Fisac y construida
en Madrid en 1965. Este edificio, tristemente demolido en 1999, se convirtió en un icono de la arquitectura moderna española gracias a su estructura rotacional innovadora. Cada planta estaba girada respecto a la anterior, generando una silueta que evocaba las pagodas orientales. Más allá de su expresividad formal, la obra evidenciaba el dominio técnico de Fisac, especialmente en el uso del hormigón armado y elementos prefabricados, campos en los que fue un verdadero pionero. La Pagoda no solo representaba un experimento volumétrico y espacial, sino también un símbolo del optimismo arquitectónico español de los años sesenta. Su polémica demolición ha sido ampliamente lamentada como una pérdida irreparable para el patrimonio arquitectónico moderno de España.
Cabe preguntarse, entonces, ¿qué factores hacen que estas dos obras resulten particularmente llamativas? ¿Cuál es la característica geométrica común que permite establecer un vínculo significativo entre ellas, más allá de sus evidentes diferencias formales y contextuales?
Las imágenes en la Figura 1 y en la Figura 2 responden por sí mismas a la primera pregunta. Para la segunda pregunta vamos a pensar en las matemáticas y más en concreto en la geometría que esconden tanto el Pabellón Phillips de Xenakis como la Pagoda de Fisac.
Observando detenidamente las imágenes del Pabellón Phillips y de la Pagoda, ¿podríamos concluir que su construcción es relativamente sencilla?, ¿podríamos pensar que bastan tablones de madera para conseguir las formas curvas de la cubierta en el caso del Pabellón Phillips y de la fachada de La Pagoda?
A continuación, exploraremos la geometría subyacente en estas obras, elemento clave que las convirtió en innovadoras en su época y, al mismo tiempo, permitió que su construcción fuera relativamente sencilla.
2. Superficies regladas
Comenzamos el estudio matemático de este tipo de proyectos analizando el Pabellón Phillips de Iannis Xenakis (Figura 1) y acompañando al autor en la realización del proyecto desde los primeros bocetos (Figura 3) a mano alzada hasta el método constructivo utilizado.
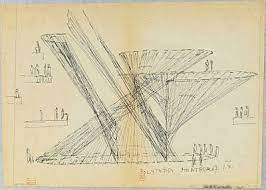
El boceto del autor, reproducido en la Figura 3, revela que tanto la cubierta como la fachada del pabellón están formadas por rectas apoyadas en ciertas curvas trazadas por Iannis Xenakis. Esto sugiere la posibilidad de construir una maqueta del proyecto utilizando hilos tensados fijados a una estructura base (Figura 4).

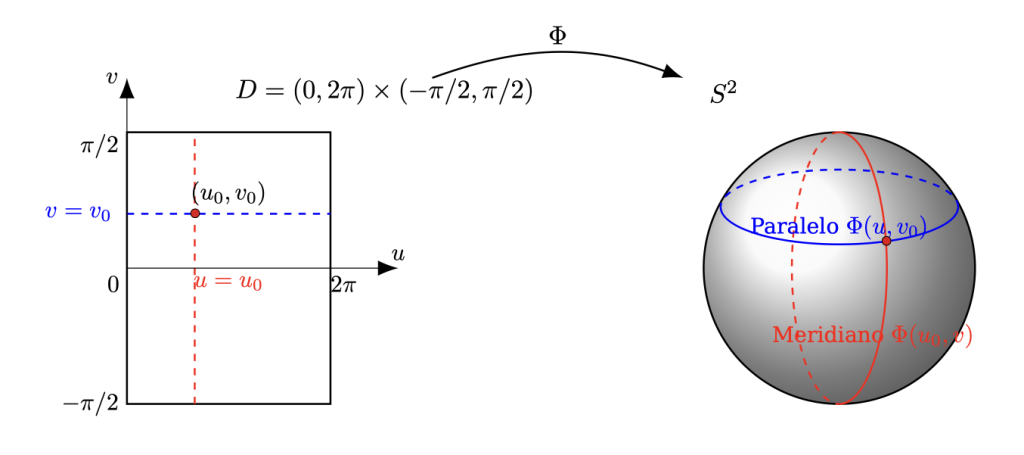
Este tipo de construcción geométrica nos remite al concepto matemático de superficie. Recordamos que una superficie es un objeto bidimensional que puede describirse localmente mediante dos coordenadas. Un ejemplo familiar es la superficie terrestre, cuyos puntos se identifican por su latitud y longitud (Figura 5). Más específicamente, el Pabellón Phillips está formado por un tipo particular de superficies conocidas como superficies regladas, ya que están generadas por una familia de rectas, llamadas rectas generatrices, que se corresponden con los hilos tensados en la maqueta del Pabellón Phillips (Figura 4). Entre los ejemplos clásicos de este tipo de superficie se encuentran el hiperboloide hiperbólico y el paraboloide hiperbólico, que analizaremos con detalle.
Al igual que una curva se puede pensar como el rastro que deja un punto que se mueve en el espacio, una superficie reglada la podemos pensar como el rastro que deja un segmento (o una recta) que se mueve en el espacio (Figura 6).
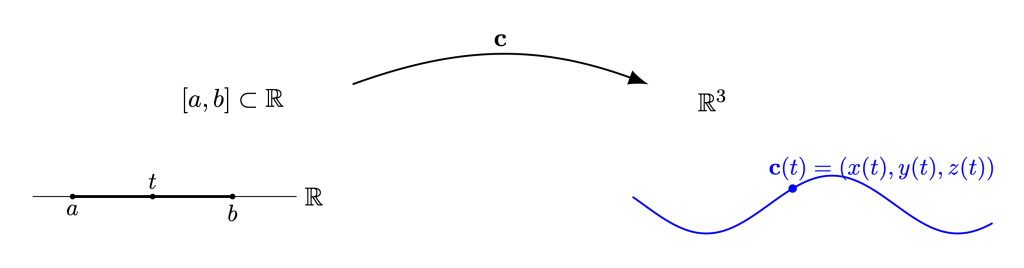
Analíticamente, una curva se describe como la traza de una aplicación \mathbf{c} : [a, b]\subset \mathbb{R}\rightarrow \mathbb{R}^3 que a cada instante de tiempo t \in [a, b]\subset \mathbb{R} le asigna un punto \mathbf{c}(t) en el espacio (Figura 7).
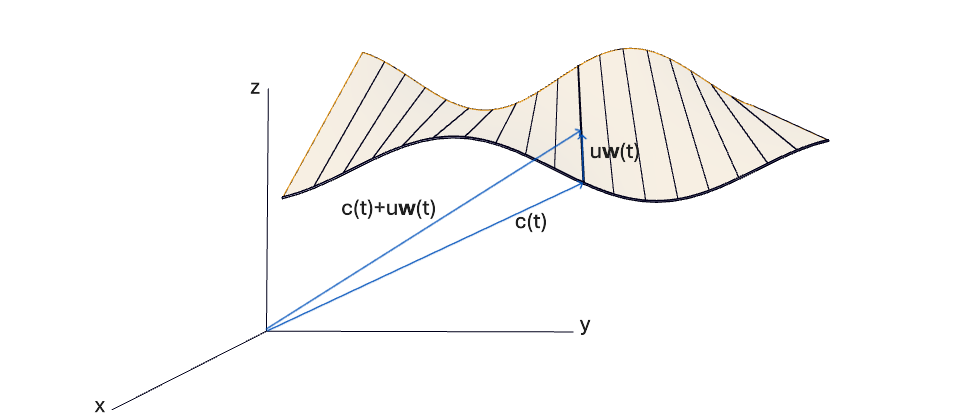
Veamos ahora cómo describir analíticamente una superficie reglada. Sabemos que una recta que contiene a un punto \mathbf{c} y tiene vector director \mathbf{w} (el que define la dirección de la recta), se escribe \mathbf{r}(u) = \mathbf{c} + u\mathbf{w}, donde u\in\mathbb{R} es el parámetro que indica el punto de la recta. Una superficie reglada es la traza que deja una recta \ell_t que se mueve en el espacio. Por tanto, el punto de la recta, \mathbf{c}, como el vector director de la misma, \mathbf{w}, varían con el tiempo, luego dependen de un parámetro t\in [a, b]\subseteq \mathbb{R} (Figuras 8 y 9).
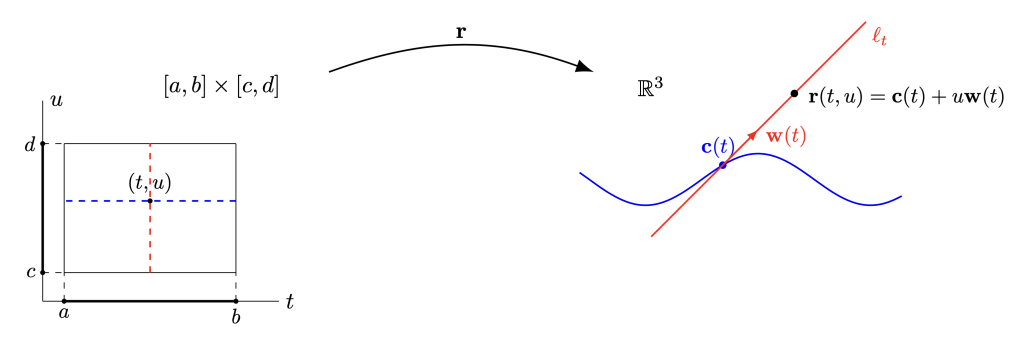
Por tanto, analíticamente la superficie reglada se describe por una aplicación de la forma
\mathbf{r}(t,u)=\mathbf{c}(t)+u\mathbf{w}(t),\quad t\in[a,b]\subseteq\mathbb{R},\quad u\in\mathbb{R}, \quad(1)
- \mathbf{c}(t), t \in [a, b] \subseteq\mathbb{R}, curva en el espacio, denominada curva directriz,
- \mathbf{w}(t), vector director de la recta en el punto \mathbf{c}(t), denominado vector director,
- t\in [a, b]\subseteq \mathbb{R}, parámetro que indica la posición de la recta en la curva directriz,
- u\in [c, d]\subseteq \mathbb{R}, parámetro que indica la posición del punto en la recta generatriz.
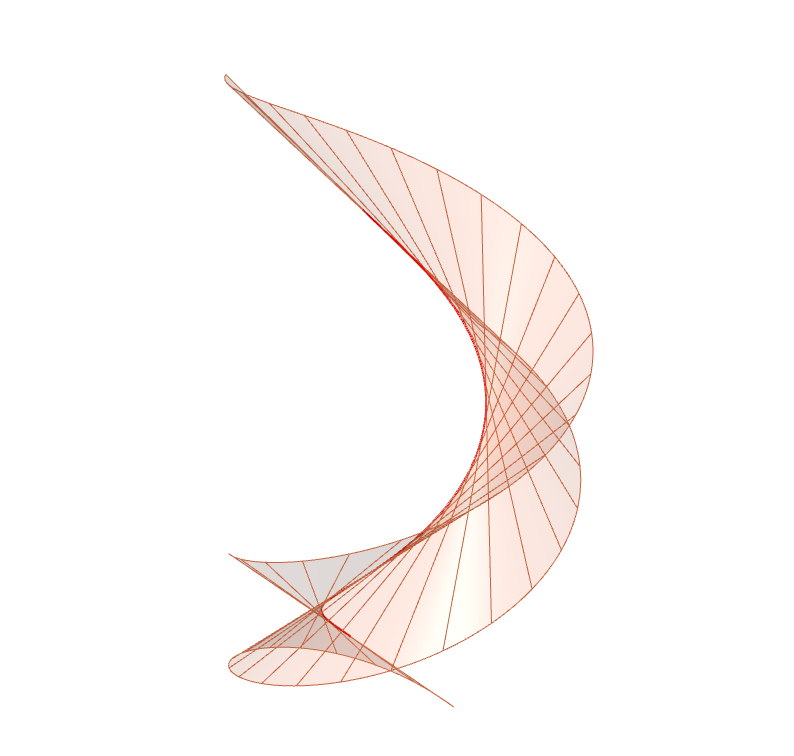
En el caso particular de que la curva directriz sea una hélice podemos obtener dos superficies destacables: el helicoide recto y la superficie desarrollable tangencial de la hélice. La primera, helicoide recto (Figura 10), es la superficie formada por rectas que se apoyan en la hélice y que son perpendiculares al eje de la hélice. La segunda, superficie desarrollable tangencial de la hélice (Figura 11), es la superficie formada por las rectas tangentes a la hélice y, por tanto: \mathbf{w}(t) = \mathbf{c}'(t).
2.1. Construcción de superficies regladas
A nivel constructivo, la información del vector director de las rectas puede no ser muy relevante. Veamos cómo podemos o bien construir o bien obtener una parametrización en forma reglada de la superficie cuando las rectas de la superficie se apoyan en dos curvas dadas. A priori, esta familia de rectas no necesariamente genera una superficie reglada, ya que puede no estar bien definida en términos de continuidad, suavidad o regularidad. Sin embargo, si añadimos una condición adicional, como por ejemplo que todas las rectas de la familia sean paralelas a un plano fijo, denominado plano director, (Figura 12) o que las rectas se apoyen a intervalos proporcionales sobre ambas curvas (Figura 13), entonces sí podemos garantizar que obtenemos una superficie reglada que, además, es única. La condición añadida impone una restricción geométrica que asegura que la familia de rectas tenga una coherencia espacial suficiente para formar una superficie reglada.
2.2. Superficie reglada con plano director
Veamos como parametrizar una superficie reglada formada por rectas que se apoyan en dos curvas, C_1, C_2, y que, a su vez, son paralelas a un plano director dado. Para ello, consideramos todos los vectores con punto inicial en C_1 y punto final en C_2 y seleccionamos aquellos vectores que son paralelos al plano director dado. Analíticamente, si \mathbf{c}_1(t), t \in I \subseteq\mathbb{R}, es una parametrización de la curva C_1 y \mathbf{c}_2(s), s \in J \subseteq \mathbb{R}, es una parametrización de la curva C_2, de todos los vectores \mathbf{w}(t, s) = \mathbf{c}_2(s) − \mathbf{c}_1(t), elegimos aquellos paralelos al plano director dado (Figura 14).

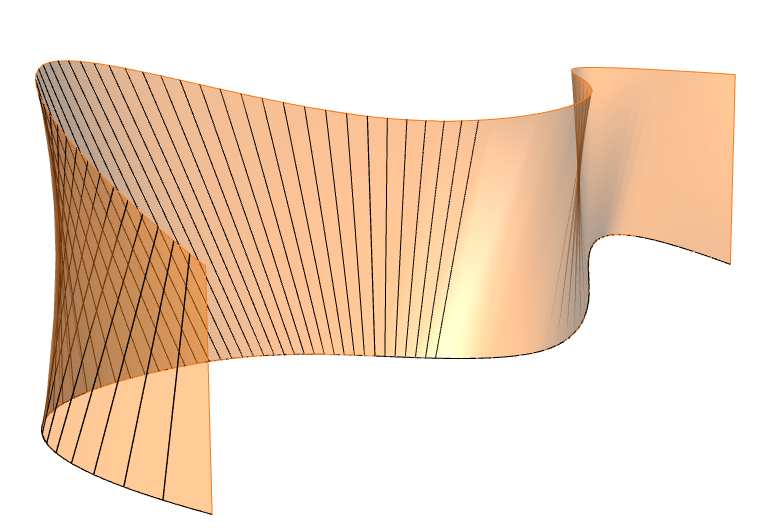
Este último enfoque es particularmente útil para modelar, por ejemplo, la cubierta de las Bodegas Ysios (Figura 15). Las Bodegas Ysios (1998–2001), ubicadas en Laguardia, es una obra del arquitecto Santiago Calatrava que destaca por el uso expresivo de la superficie reglada que forma la cubierta. Observando atentamente la imagen en la Figura 15, concluimos que podemos aproximar la cubierta por una superficie reglada formada por las rectas que se apoyan en dos curvas sinusoidales desfasadas y que son paralelas al plano perpendicular a la fachada. Pongamos
\left\{\begin{array}{l} \mathbf{c}_1(t)=(0,t,\mathrm{sen}(t)), \quad t\in [0,4\pi], \\ \mathbf{c}_2(t)=(a,t,\cos (t)),\quad t\in [0,4\pi], \end{array} \right.donde a es el ancho de la planta del proyecto. Una parametrización de la superficie reglada es
\begin{array}{l} \mathbf{r}(t,u)=\mathbf{c}_1(t)+u\mathbf{w}(t),\quad t\in [0,4\pi],\; 0\leq u\leq 1, \\ \text{con }\mathbf{w}(t)=\mathbf{c}_2(t)-\mathbf{c}_1(t)=(a,0,\cos (t)-\mathrm{sen}(t)). \end{array}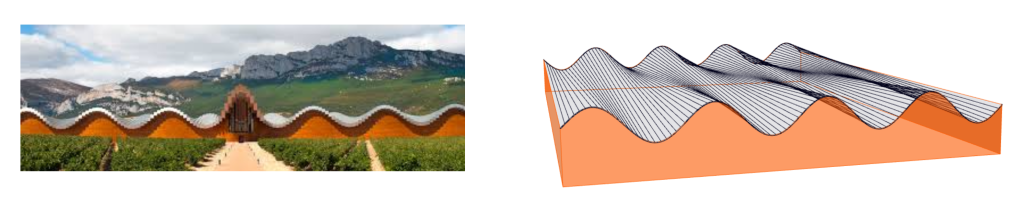
2.3. Superficie formada por rectas apoyadas a intervalos proporcionales sobre dos curvas
Volviendo al Pabellón Phillips (Figura 16) observamos que las rectas generatrices de las cubiertas no son paralelas a ningún plano. En este caso la superficie reglada está formada por rectas apoyadas a intervalos proporcionales sobre dos curvas trazadas por el arquitecto. En la Figura 17 se observa cómo dichas curvas guía sirven de base para la construcción de pabellón.
3. Geometría de las superficies regladas
Veamos cómo la geometría de una superficie reglada condiciona la construcción de la misma. Destacamos dos cuestiones clave: línea de estricción y torsión geodésica. La primera está relacionada con la distancia entre generatrices adyacentes (que condiciona el ancho de las láminas en el caso en el proyecto se realice con láminas de madera) y la segunda nos indica si la superficie se puede hacer o no con una hoja de papel. Para analizar esta segunda cuestión necesitamos estudiar el concepto de curvatura de una superficie.
3.1. Línea de estricción y arista de retroceso
Como hemos señalado, interesa encontrar los puntos de las generatrices en los que la distancia entre dos generatrices adyacentes es la menor posible. Dichos puntos se encuentran, en general, en una curva que se denomina línea de estricción. Tanto en la superficie de la Figura 12 como en la de la Figura 13, dichos puntos se encuentran situados en un segmento. Sin embargo en las superficies de las Figuras 18 y 19, dichos puntos se encuentran en una curva.
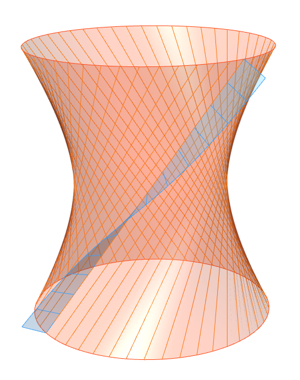
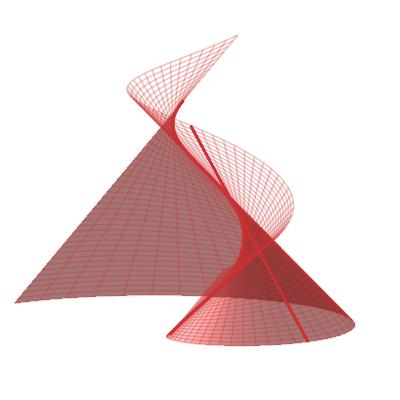
En el caso del hiperboloide hiperbólico de la Figura 18 (superficie obtenida al rotar una rama de hipérbola respecto de un eje), la línea de estricción es la curva azul señalada en la Figura 18. En la superficie desarrollable tangencial de la Figura 19, la línea de estricción es precisamente la hélice. Obsérvese que, a lo largo de la hélice, la superficie de la Figura 19 se pliega en dos hojas por lo que, en estos casos, la línea de estricción se denomina también arista de retroceso.
Nótese también que los puntos de la línea de estricción del hiperboloide hiperbólico (Figura 18) son precisamente aquellos en los que la forma de la superficie es “más curva”. Dada la importancia del concepto de curvatura, dedicaremos la sección 3.2 al estudio de la noción de curvatura en superficies y veremos a qué nos referimos con “más curva”.
Desde un punto de vista estructural, la línea de estricción tiene implicaciones significativas ya que ayuda a determinar cómo se distribuyen las tensiones y fuerzas en la superficie, lo que es esencial para garantizar la estabilidad y resistencia de la estructura.
3.2. Curvaturas principales y curvatura de Gauss
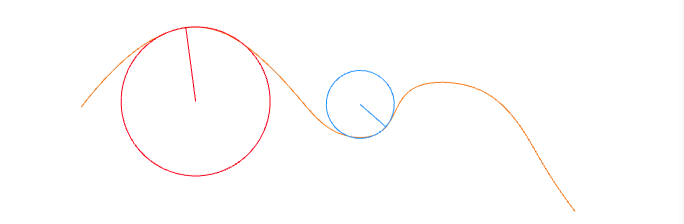
Para analizar el concepto de curvatura en una superficie, empezamos con el concepto de curvatura de una curva. En el caso de las circunferencias, es inmediato notar que una circunferencia de radio r = 2 está menos curvada que una circunferencia de radio r = 1. Pues bien, definimos la curvatura de una circunferencia como el inverso del radio de la misma.
Observamos primero que la curvatura es un concepto local, pues dada una curva cualquiera C, el aspecto de la misma depende del punto de la curva en el que nos estemos fijando. Fijado un punto P de C, aproximamos la curva en un entorno de P por una circunferencia y definimos la curvatura en P, y se denota \kappa, como el inverso del radio de la circunferencia osculatriz de C en P -circunferencia con mayor contacto con la curva C en un entorno del punto- (véase la Figura 20). Así, la curvatura de C en P es \kappa = 1/r, siendo r el radio de la circunferencia osculatriz de C en P .
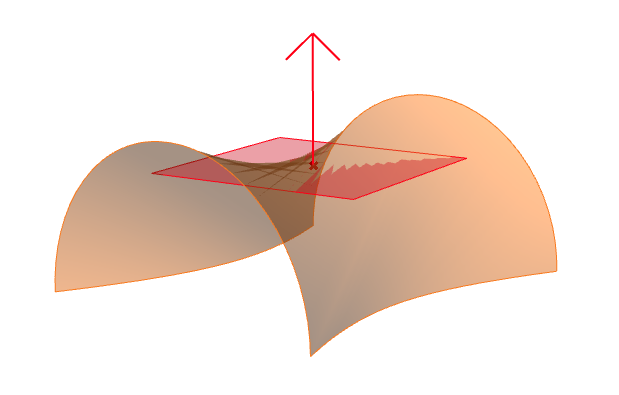
Consideramos ahora una superficie S y un punto P de la misma. En dicho punto, observamos el vector perpendicular y el plano tangente a la superficie (vector rojo y plano rojo en la figura 21). Fijado un vector \mathbf{v} del plano tangente (vector azul en la figura 22), construimos el plano que contiene a P y que está generado por el vector del plano tangente \mathbf{v} y el vector perpendicular (vector rojo en la figura 22). Dicho plano interseca a la superficie en una curva C (en azul), llamada sección normal, y calculamos la curvatura de dicha curva en el punto P (inverso del radio de la correspondiente circunferencia osculatriz), asignando un signo a la curvatura en función de como está situada la circunferencia osculatriz respecto del plano tangente a la superficie. A la curvatura con signo así calculada la denominamos curvatura normal de S en P en la dirección del vector \mathbf{v}.
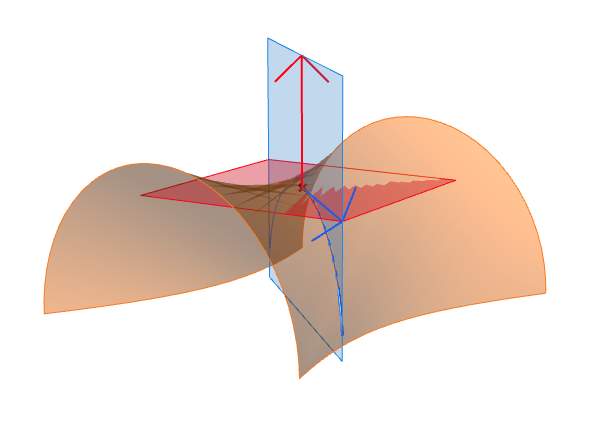
En el caso de la superficie de la figura 22, la curvatura normal en P en la dirección del vector \mathbf{v} tiene signo negativo, pues la sección normal está en el lado opuesto al del vector perpendicular a la superficie. En la figura 24, las curvaturas de las circunferencias naranja tienen signo opuesto a las de las circunferencias verdes.
Repetimos la operación para distintos vectores tangentes a la superficie (Figura 23) y de todas las posibles curvaturas normales, seleccionamos la máxima y la mínima, \kappa_{max} y \kappa_{min}, denominadas curvaturas principales (se corresponden con las curvaturas de las circunferencias azules en la figura 24). Las curvaturas principales recogen la información
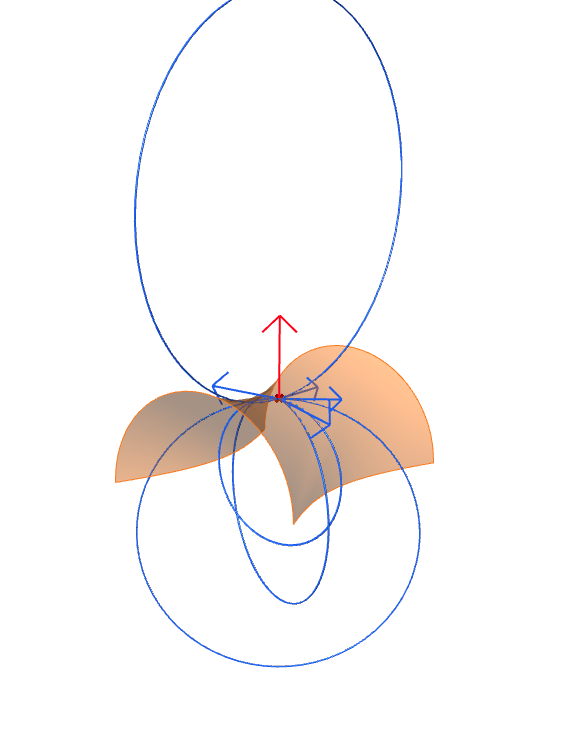
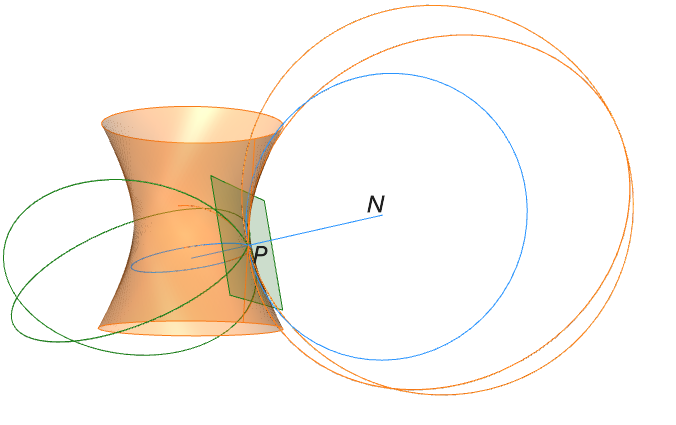
esencial sobre la forma de la superficie en un entorno del punto P y resulta especialmente interesante conocer el signo de las curvaturas principales. Para ello, basta con conocer el producto de ambas curvaturas, denominada curvatura de Gauss,
\kappa_G = \kappa_{min} \kappa_{max}.
y, como vamos a ver, es un concepto fundamental en la teoría de superficies. En el caso del hiperboloide hiperbólico (Figura 24), es evidente que la curvatura de Gauss es negativa en todos sus puntos.
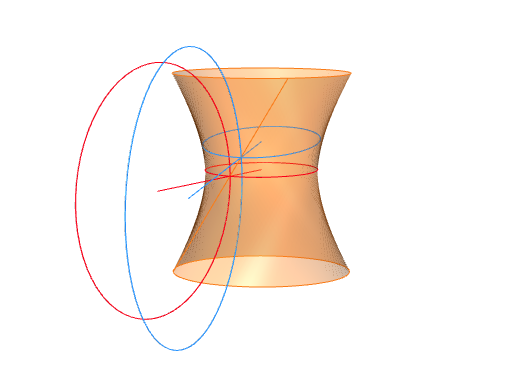
Consideramos ahora una superficie reglada S. Fijada una generatriz (recta naranja en la superficie de la figura 25), seleccionamos el punto de la generatriz en el que el valor abso- luto de la curvatura de Gauss, |\kappa_G|, es máximo. Se demuestra que dichos puntos —llamados puntos centrales — se encuentran precisamente en la línea de estricción (circunferencia roja de menor radio en la superficie de la figura 25), lo que nos da otra interpretación geométrica de la línea de estricción.
3.3. Superficies desarrollables y no desarrollables
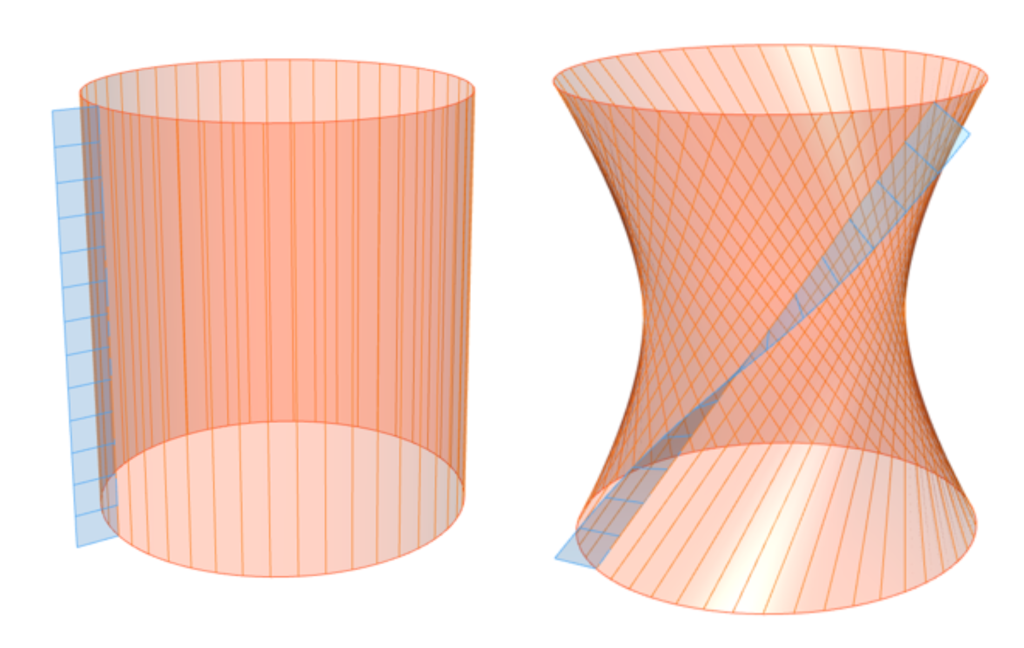
En la sección 2.1 hemos visto cómo construir superficies regladas a partir de una familia de rectas. En los ejemplos más triviales —como el plano, el cilindro y el cono— estas construcciones no presentan dificultad, e incluso podemos realizarlas físicamente a partir de una hoja de papel. Esto sugiere una pregunta natural: ¿toda superficie reglada se puede construir a partir de una hoja de papel sin necesidad de estirarla o deformarla? La respuesta es claramente negativa: basta con intentar reproducir un hiperboloide hiperbólico utilizando una hoja de papel para ver que no es posible hacerlo.
La clave radica en la curvatura de Gauss: el hecho de que esta sea idénticamente nula, es decir, \kappa_G \equiv 0, caracteriza a las superficies que pueden desplegarse sobre un plano, por lo que se denominan superficies desarrollables. Como vimos anteriormente, a diferencia del cilindro, que es desarrollable—cuya curvatura de Gauss es cero en todos sus puntos—, el hiperboloide hiperbólico presenta curvatura de Gauss negativa en cada punto, lo que indica que posee una geometría intrínsecamente distinta a la del plano.
Si observamos la superficie en Figura 19, no es tan fácil intuir si es desarrollable o no. Por tanto, en general, nos interesa tener una fórmula para que, a partir de la parametrización de la superficie, se pueda asegurar si es o no desarrollable.
Consideramos una superficie S con la parametrización dada en (1). Esto es,
\mathbf{r}(t,u)=\mathbf{c}(t)+u\mathbf{w}(t),\quad u,t\in\mathbb{R},
y nos situamos en un punto P de la superficie. Consideramos las siguientes dos curvas contenidas en la superficie que pasan por P (curvas negras en la figura 26):
- generatriz por P que tiene vector director \mathbf{w}_1 = \mathbf{w}(t),
- curva (u= constante) que tiene vector tangente \mathbf{w}_2=\mathbf{c}'(t)+u\mathbf{w}'(t), t\in\mathbb{R}, u =constante.
El plano tangente a la superficie en P (en azul) está generado por los vectores tangentes \mathbf{w}_1 y \mathbf{w}_2 , y el vector perpendicular unitario a la superficie en P (en azul) se construye como perpendicular a \mathbf{w}_1 y \mathbf{w}_2 a la vez y, por tanto, tiene la siguiente expresión:
\mathbf{N}= \frac{\mathbf{w}_1 \times \mathbf{w}_2}{\left\Vert\mathbf{w}_1 \times \mathbf{w}_2\right\Vert}= \frac{\mathbf{w}(t)\times (\mathbf{c}'(t) + u\mathbf{w}'(t))}{\left\Vert\mathbf{w}(t)\times (\mathbf{c}'(t) + u\mathbf{w}'(t))\right\Vert }\\ = \frac{\mathbf{c}'(t) \times \mathbf{w}(t)+ u\mathbf{w}'(t)\times \mathbf{w}(t)}{\left\Vert \mathbf{c}'(t) \times \mathbf{w}(t)+ u\mathbf{w}'(t)\times \mathbf{w}(t) \right\Vert }.\quad (2)Obsérvese que, para que el vector perpendicular esté bien definido, es necesario que el vector \mathbf{w}_2 no se anule, por lo que los vectores \mathbf{c}'(t) y \mathbf{w}'(t) no se pueden anular simultá- neamente, y que los vectores \mathbf{w}_1 y \mathbf{w}_2 no sean proporcionales, lo que daría un producto vectorial nulo.
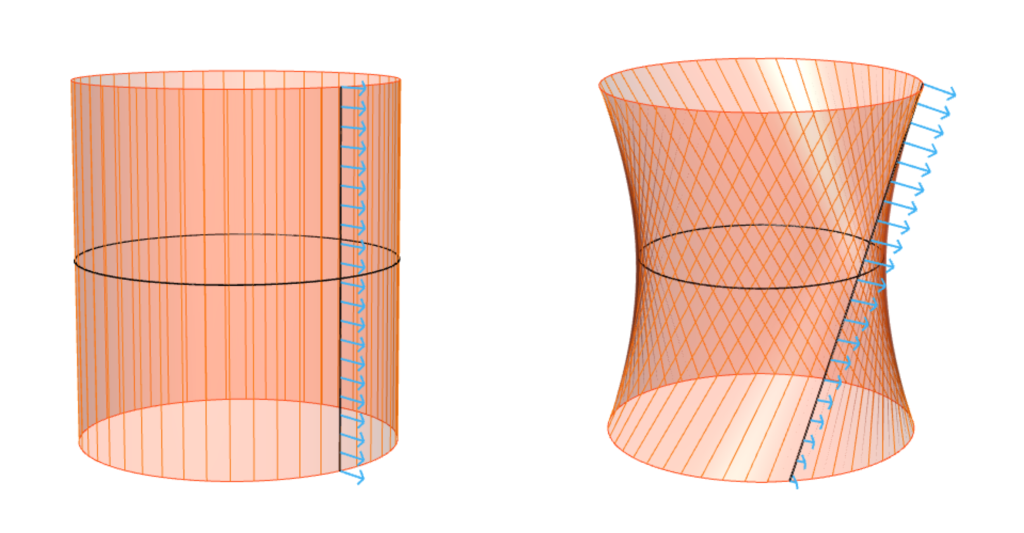
En la Figura 27 se observa que, mientras en el cilindro el vector perpendicular permanece constante a lo largo de una generatriz, en el hiperboloide hiperbólico dicho vector varía conforme se recorre la misma. Esta variación del vector perpendicular indica que la curvatura de Gauss no es nula, lo que implica que la superficie no es desarrollable, es decir, no puede extenderse sobre un plano sin deformaciones. Por tanto, conviene estudiar si el vector perpendicular se mantiene constante a lo largo de cada generatriz.
El vector perpendicular N se mantiene constante a lo largo de la generatriz cuando la expresión de N en la ecuación (2) no depende del parámetro u. Tenemos los siguientes casos:
i) \mathbf{w}'(t) = 0, pues en ese caso la expresión del vector perpendicular es la siguiente:
\mathbf{N}=\frac{\mathbf{c}'(t)\times\mathbf{w}(t)}{\|\mathbf{c}'(t) × \mathbf{w}(t)\|}.
La condición \mathbf{w}'(t) = 0 implica que el vector \mathbf{w}(t) no depende de t, por lo que todas las generatrices tienen la misma dirección y la superficie es un cilindro generalizado.
ii) \mathbf{c}'(t) = 0, pues en ese caso la expresión del vector perpendicular es la siguiente:
\mathbf{N}=\frac{\mathbf{w}'(t)\times\mathbf{w}(t)}{\|\mathbf{w}'(t)\times\mathbf{w}(t)\|}.
La condición \mathbf{c}'(t) = 0 implica que el vector \mathbf{c}(t) no depende de t, por lo que la curva directriz degenera en un punto y la superficie es un cono generalizado.
iii) El vector \mathbf{w}'(t)\times\mathbf{w}(t) es proporcional a \mathbf{c}'(t)\times\mathbf{w}(t). Geométricamente, dicha condición indica que los vectores \mathbf{w}'(t), \mathbf{w}(t) y \mathbf{c}'(t) están en un mismo plano (son coplanarios); por lo que su producto mixto:
p(t) = [\mathbf{w}'(t), \mathbf{w}(t) , \mathbf{c}'(t) ] = (\mathbf{w}'(t)\times\mathbf{w}(t) ) \cdot \mathbf{c}'(t) \qquad (3)
es idénticamente nulo. A partir de la expresión del vector perpendicular (2) y teniendo en cuenta la parametrización de la superficie (1), suponiendo p(t)\equiv 0, se puede encontrar una curva (que es precisamente la arista de retroceso) cuyas rectas tangentes son precisamente las generatrices de la superficie. Por tanto, en este caso, la superficie está formada por rectas tangentes a la arista de retroceso y la superficie se denomina desarrollable tangencial.
Curiosamente, la condición p(t)\equiv 0 es equivalente a que la curvatura de Gauss sea idénticamente nula, \kappa_G \equiv 0, y tenemos la siguiente clasificación de superficies regladas:
- Superficie desarrollable: si \kappa_G \equiv 0 (equivalentemente p(t) \equiv 0).
- Superficie no desarrollable: si existe algún t tal que \kappa_G \neq 0 (equivalentemente p(t)\not\equiv 0).
3.4. Torsión geodésica
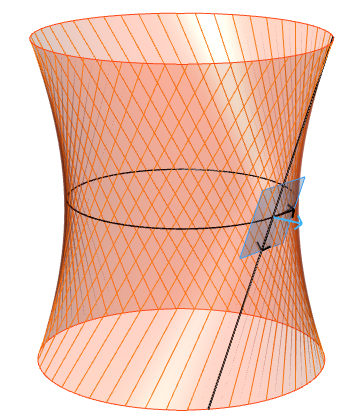
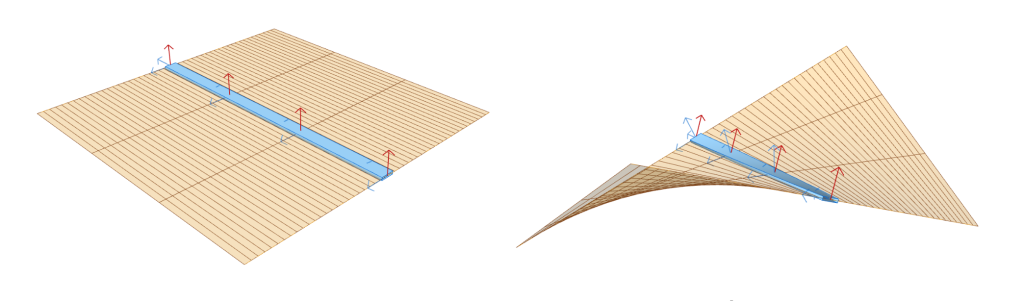
Pensando en el proceso constructivo de una superficie reglada, el que esta sea desarrollable o no tiene una implicación directa en cómo están metidas las generatrices en la superficie. Idealmente una recta no tiene grosor, pero al materializarla adquiere cierto grosor. Si consideramos bandas a lo largo de cada generatriz cuyos lados extremos son los vectores normales en los extremos de la generatriz, observamos que dicha banda es plana o no dependiendo de si la superficie es desarrollable o no (Figura 28).
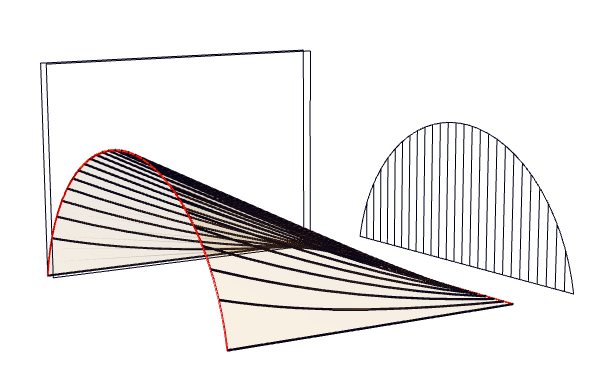
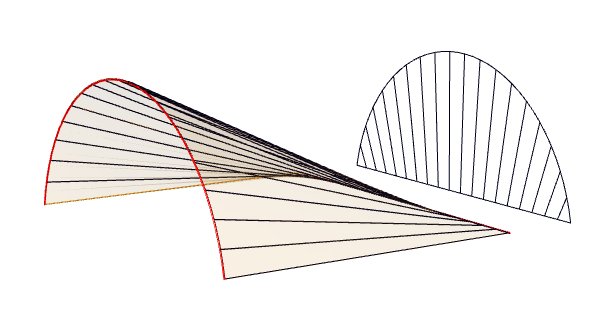
Si materializamos ahora las generatrices como tablones de madera con sección rectangular, observamos que dichos tablones torsionan sobre su eje dependiendo de si la superficie es desarrollable o no (Figura 28). Tal efecto lo mide la variación del vector perpendicular a lo largo de la generatriz y se denomina torsión geodésica. En el caso de una superficie desarrollable, la torsión geodésica de la generatriz es cero (plano en la Figura 29), mientras que en el paraboloide hiperbólico (superficie reglada formada por los segmentos que se apoyan en dos segmentos no coplanarios), la torsión geodésica es no nula y la superficie es no desarrollable.
4. Hiperboloide hiperbólico y paraboloide hiperbólico en Arquitectura
Ahora que hemos aprendido a observar las superficies regladas, volvamos a “La Pagoda” de M. Fisac (Figura 2). Las superficies de transición entre plantas son precisamente paraboloides parabólicos, superficie doblemente reglada, que como hemos visto es relativamente fácil de construir, ya que los encofrados se pueden realizar con listones de madera y el resultado es visualmente bastante llamativo, ya que no es una superficie plana.
Además del llamativo Pabellón Phillips de I. Xenakis, me gustaría mostrar otra obra de I. Xenakis que sí podemos ver en uno de nuestros viajes por el mundo: La “Torre de la Sombra” situada en el complejo del Capitolio de Chandigarh, India (Figura 30). La torre fue diseñada por Xenakis bajo la dirección del conocido arquitecto suizo-francés Le Corbusier durante la década de 1950. Aunque no forma parte directa del edificio del Parlamento, la torre representa uno de los elementos más innovadores del conjunto urbano, tanto por su valor pedagógico como por su propuesta geométrica. Su función principal era demostrar cómo el diseño arquitectónico puede controlar la radiación solar, utilizando formas y orientaciones específicas para bloquear la incidencia directa del sol en determinadas épocas del año.
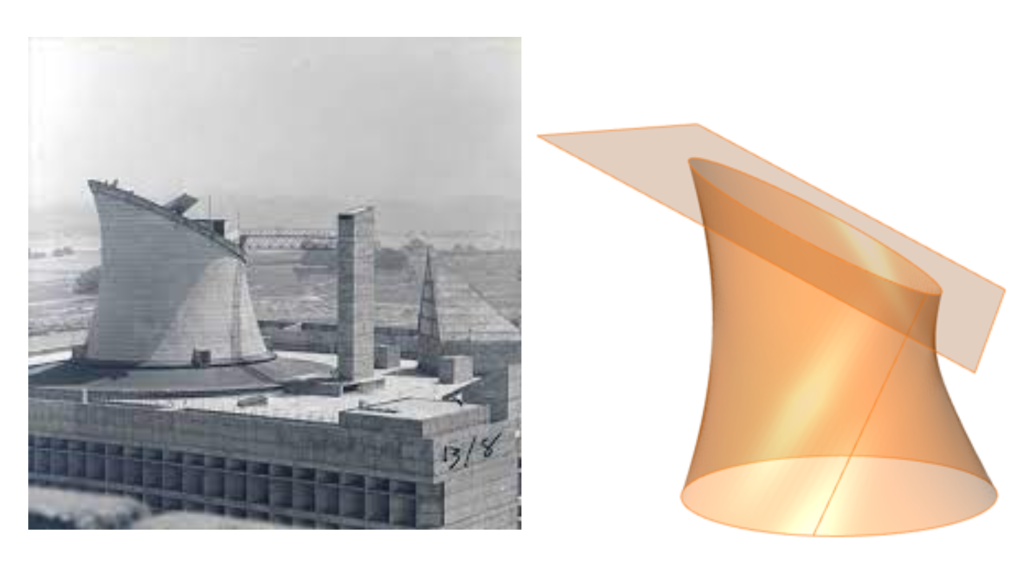
La torre está compuesta por una estructura basada en un hiperboloide hiperbólico intersecado con un plano (imagen de la derecha en la Figura 30). Esta elección geométrica evidencia la influencia de Xenakis, quien aplicaba conceptos matemáticos y musicales en la arquitectura. La Torre de la Sombra no sólo es un experimento de control climático pasivo, sino también una síntesis entre arte, ciencia y técnica, reflejo del pensamiento interdisciplinar que caracterizó tanto a Le Corbusier como a Xenakis.
No podemos concluir nuestro recorrido sin mencionar algunas obras que aún pueden visitarse, ni sin destacar a uno de los arquitectos que exploró con mayor profundidad la idea de la superficie reglada: Félix Candela (1910-1997) ingeniero y arquitecto hispano-mexicano. Félix Candela llevó al límite las posibilidades estructurales y expresivas del hormigón armado mediante el uso de paraboloides hiperbólicos. Sus emblemáticas estructuras de cascarón delgado, como la “Iglesia de la Virgen Milagrosa” y el “Pabellón de Rayos Cósmicos” en la UNAM (Ciudad de México), son ejemplo del dominio formal y técnico de Candela en el uso del hormigón y las superficies regladas. Otro caso destacable fuera de México y realizado junto con los arquitectos Enrique de la Mora y Palomar y José Ramón Azpiazu, y el ingeniero José Antonio Torroja, es la “Iglesia de Nuestra Señora de Guadalupe” en Madrid (Figura 31).

Referencias
[1] Struik D. J. Lectures on Classical Differential Geometry. Dover Publications, 2a edición, 1988.
[2] Spivak M. A Comprehensive Introduction to Differential Geometry, Vol. III. Publish or Perish, 3a edición, 1999.
[3] Pottmann H., Wallner J. Computational Line Geometry. Springer-Verlag, 2001.
[4] Pottmann H., Asperl A., Hofer M., Kilian A. Architectural Geometry. Bentley Institute Press, 2007.
Mª Eugenia Rosado María es doctora en Ciencias Matemáticas y profesora en la Universidad Politécnica de Madrid. Su actividad investigadora se enmarca en el ámbito de la geometría diferencial y sus aplicaciones, con especial atención al estudio de invariantes diferenciales, estructuras geométricas y sistemas de ecuaciones diferenciales desde un enfoque geométrico. Sus trabajos abordan, entre otros temas, la teoría de conexiones y métricas pseudo-riemannianas, así como su relación con la relatividad general y la física matemática. Asimismo, ha contribuido al análisis de variedades homogéneas y espacios simétricos, incluyendo estudios sobre espacios lorentzianos y las ecuaciones de Einstein–Yang–Mills.
- eugenia.rosado@upm.es ↩︎