HERCCULES primary objectives can be divided into:
- Convective heat transfer quantification on a horizontal and a vertical flat plate in which the conductive and radiative heat mechanisms are minimized.
- Evaluation of the influence of spacing in the convective heat transfer between vertical flat plates.
- Quantification of the efficiency of a thermal strap in low pressure conditions connected to an external radiator.
- Quantification of the force convection on an external surface by measuring the relative wind speed.
- Thermal environment characterization by measuring: (i) Earth albedo, (ii) Outgoing Longwave Radiation, (iii) Solar Irradiance, (iv) Sky temperature and, (v) Air pressure and temperature.
A secondary objective of this mission is the creation and validation of a Nadir sensor made of COTS for use in space and stratospheric flights. Nadir sensors are used for attitude determination in satellites. There are several designs for Nadir sensor, but most of them only work for altitudes above 500 km. In the case of balloons, the altitude rarely exceeds 30 km, making impossible to use commercial nadir sensors. Therefore, for this secondary experiment it is intended to redesign a Nadir sensor so it can work at the range of 20-30 km. With the incorporation of a Nadir sensor, it is expected to improve the performance of the attitude determination system in balloons, especially for those cases where the Inertial Measurement Unit (IMU) lacks a high accuracy.
HERCCULES experiment can be divided into 4 main parts.
Firstly, the Environmental Lab which will carry the radiative measuring instruments (pyranometer and pyrgeometer) which will provide valuable information required to complete and validate the developed thermal environment characterization models based on satellite data. These ‘in situ’ measurements will be used to study the rate of change of the thermal environment. Data obtained will be compared with the satellite measured data (1 hour grid) to evaluate the rate of change and the potential effect of not considering the short-term variations.
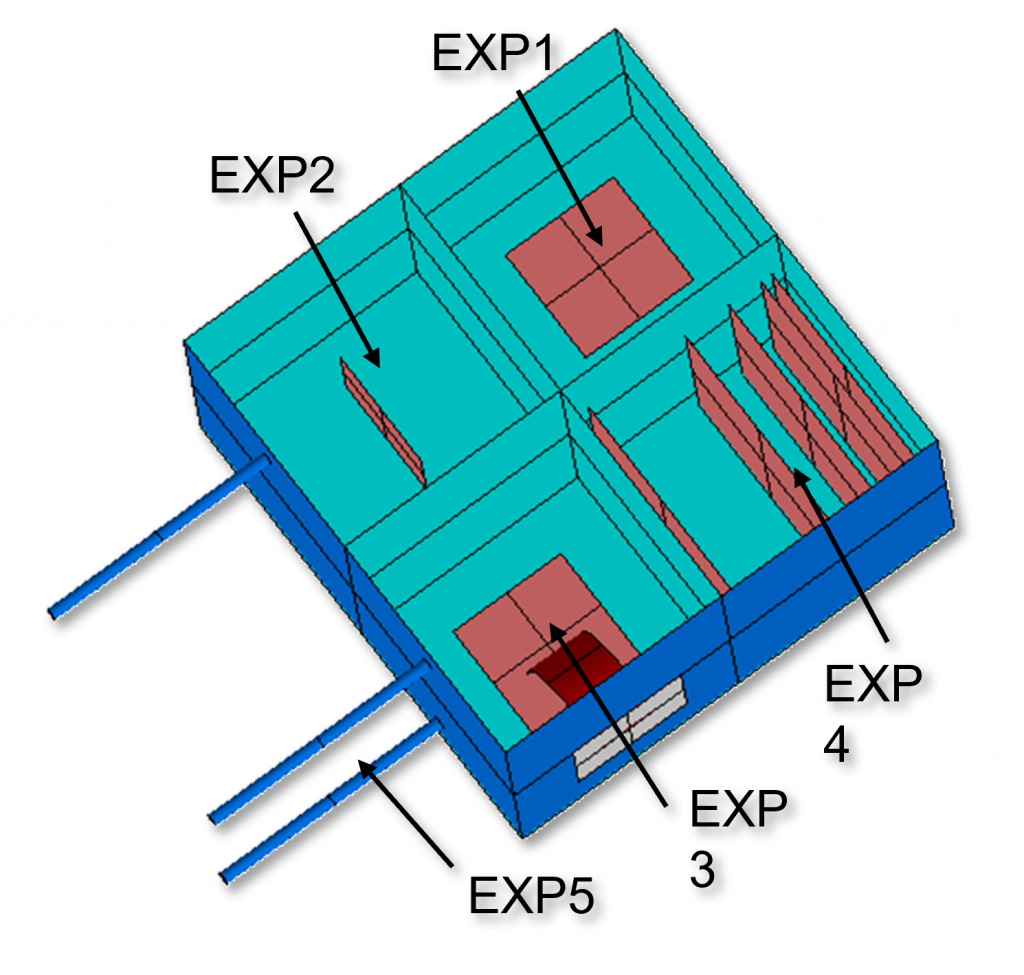
Secondly, the Heat Transfer Lab, which will be equipped with several temperature sensors to register the temperature of the system during the whole flight. The characteristics of the air at the altitude reached during the BEXUS/REXUS program will allow to quantify not only the heat transfer through air in the continuum regime but also in the asymptotic regime, where free convection takes place. To do so, the Heat Transfer Lab will be configured based on 4 specially designed compartments with different configurations. Data about temperatures and dissipated power will be gathered to verify and correct the thermal mathematical models implemented in ESATAN-TMS and ANSYS Fluent software. The description of the five experiments which integrate the Heat Transfer Lab are the following:
- EXP1: A heated horizontal plate to quantify the free convective heat transfer.
- EXP2: A heated vertical plate to quantify the free convective heat transfer.
- EXP3: A heated horizontal plate thermally attached to a radiator using a strap. This experiment will measure the efficiency of both the radiator and the thermal strap operating in such conditions.
- EXP4: Several vertical plates (with one heated in the middle) to quantify the heat transfer in the continuum regime through the air.
An additional experiment, EXP5, will be included for measuring the relative wind speed on an external surface to quantify the force convection.
In the experiment, not only the temperature of the heated plates would be measured, but also the temperature of the envelope to decouple the experiments from the outer surfaces and to be able to correlate each one with its separate thermal mathematical model.
Thirdly, the Attitude Lab will include a Nadir sensor, based on IR photodiodes, which will gather measurements during the float phase of the flight that will be later correlated with the expected Nadir direction derived from the estimated attitude. Such correlation will allow to validate the Nadir sensor design. Attitude will be estimated using a Kalman Filter using the IMU, GPS and magnetometer measurements.