National Projects

ROBOGAIT (Sistema Robótico No Invasivo Para El Análisis Biomecánico De La Marcha Humana)
Entidad financiadora: Ministerio de Ciencia e Innovación (CYCIT-RETOS) ref: PID2020-118299RB-I00
Entidades participantes:UPM, LAMBECOM (URJC), INEF (UPM
Duración, desde: 01/09/21 hasta: 31/08/24
Cuantía de la subvención: 116.765 €
Puesto: Investigador Principal
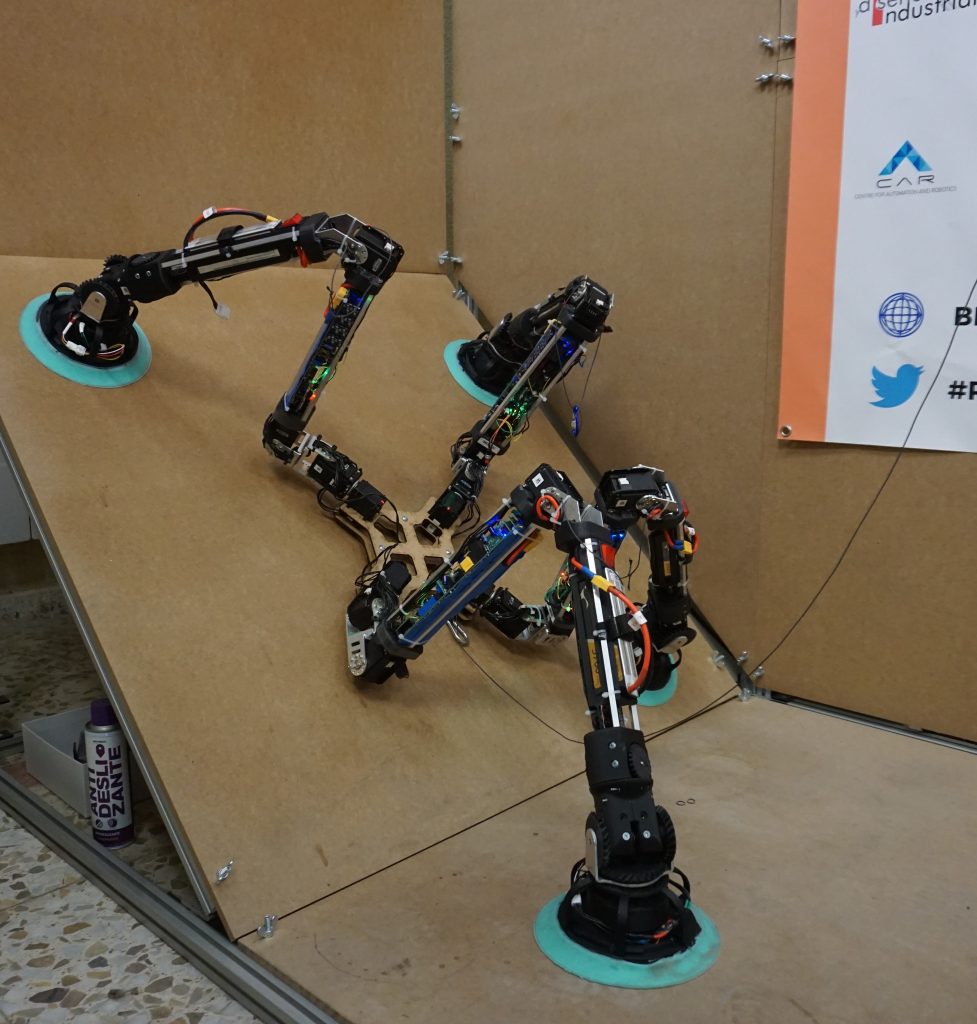
ROMERIN (RObot Modular EscaladoR para inspección de INfraestructuras)
Entidad financiadora: Ministerio de Economía y Competitividad (CYCIT-RETOS) ref: DPI2017-85738-R.
Entidades participantes:, UPM
Duración, desde: 01/01/18 hasta: 31/04/21
Cuantía de la subvención: 96.800 € (UPM 711.875€)
Puesto: Investigador Principal

ROBOHEALTH (ENTORNOS INTELIGENTES PARA PACIENTE CONVIVIENDO CON ROBOTS).
Entidad financiadora: Ministerio de Economía y Competitividad (RETOS). ProjectDPI2013-47944-C4-2-R.
Entidades participantes:, UPM UC3M
Duración, desde: 01/01/14 hasta: 30/06/18
Cuantía de la subvención: 81070 € UPM
Puesto: Investigador (Desarrollo SW)
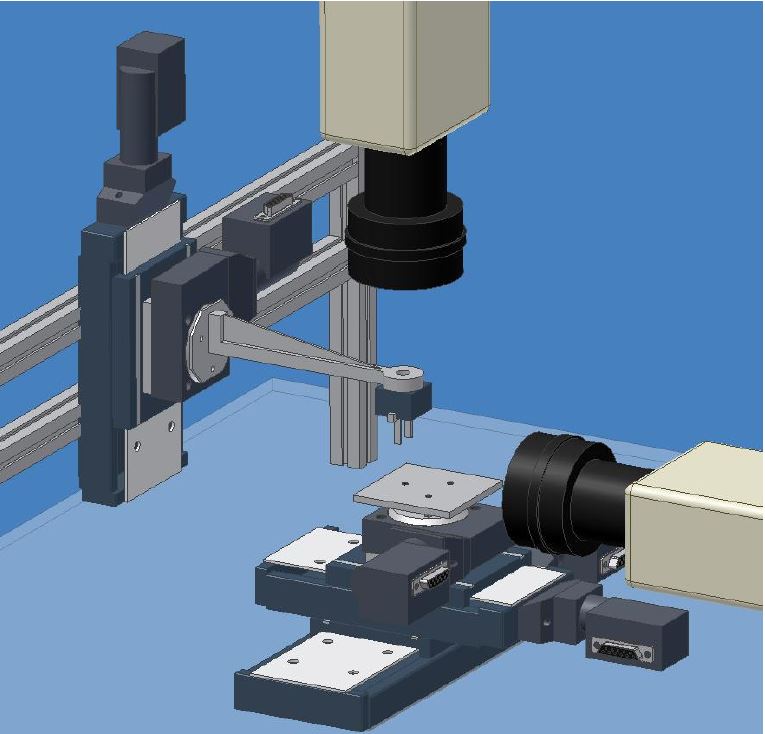
MICROMULT (Sistemas Micro-robóticos Multiconfigurables).
Entidad financiadora: Ministerioa de Ciencia y Tenología Project MEC – DPI2005-08932-C02-01
Entidades participantes : Universidad Politécnica de Madrid, INASMET
Duración: Sept 2005 – Sept 2008.
Presupuesto: 144.704 €.
Puesto: Investigador responsable de los módulos robóticos de pequeñas dimensiones
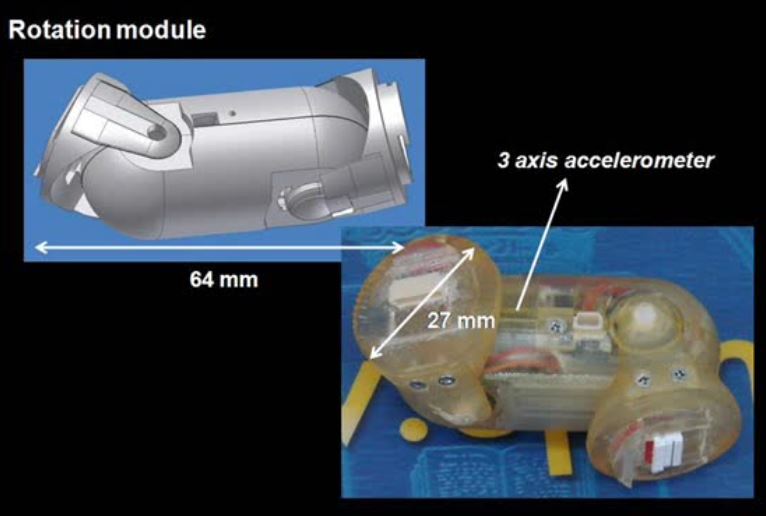
MICROROB: Microrobot Autónomo para Exploración de Tuberías y Conductos
Entidad financiadora: Ministerioa de Ciencia y Tenología Project CICYT, TIC2001-3838-C03-03.
Participan: : Universidad Politécnica de Madrid, INASMET.
Duracion: 2001 hasta 2004.
Presupuesto UPM: 43.032 €
Puesto: Investigador. Diseño del concepto del robot. Selección de materiales, y componentes. Dirección del diseño del sistema

ROBTET (RObot para Trabajos En Tensión).
Entidad financiadora: OCIDE Project PIE-132.198
Participan: UPM, Iberdrola, Cobra S.A
Duracion: 1996 hasta 2000.
Puesto: Investigador Predocotoral. Desarrollo del simulador cinemática y de un sistema de protección basado en la generación de barreras virtuales. Optimización en velocidad del software. Desarrollo de la Interfaz sobre SGI. Operador especializado. Progrmación de interfaces y control. Intervención de las comunicaciones en capas 1 y 2 OSI.