MICROMULT
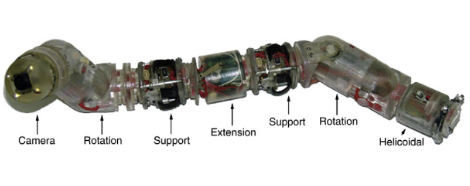
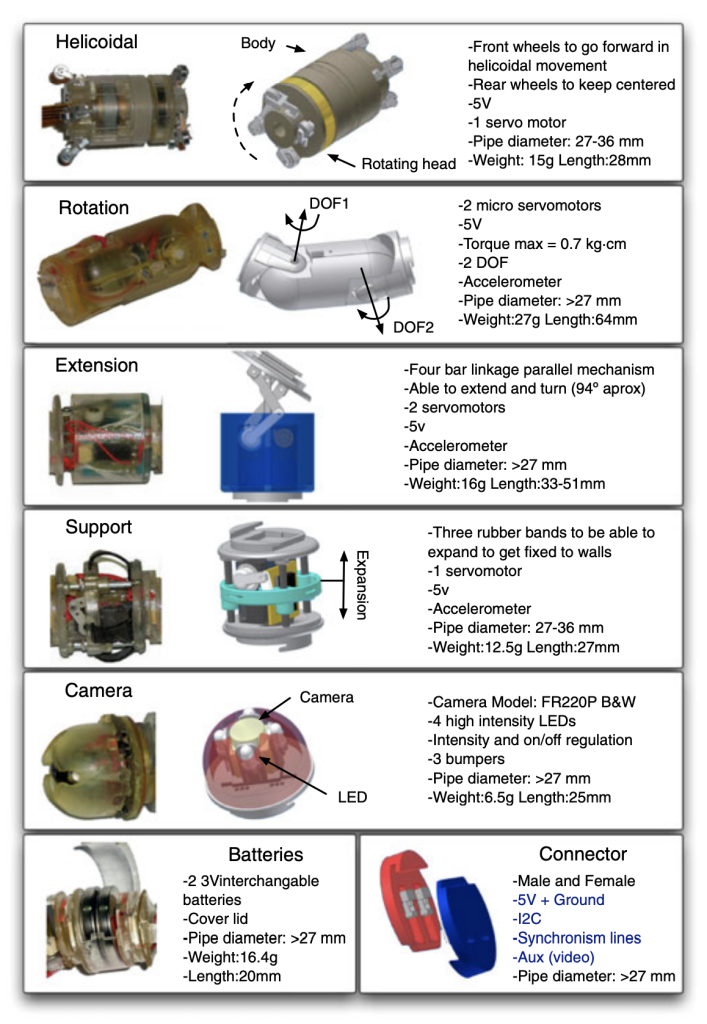
This is the project where I developed my PhD thesis. Its goal is the design and construction of a multi-configurable heterogeneous modular micro-robotic system able to move in narrow environments (pipes or small cavities). We have developed three different drive modules: inchworm, snake and helicoidal. And camera and battery modules as well. All modules have been developed from scratch and include actuators (servomotors) and electronics (microcontroller plus sensors). We have proposed a behavior-based control architcture for these types of robots. There is a simulation environment developed for this project available here.
I also took part in the I-SWARM: Intelligent Small World Autonomous Robots for Micro-manipulation (FP6). The aim of the I-SWARM project is the realisation of a “real” micro-robot swarm. More than one hundred micro-manufactured autonomous robots will be able for the collective execution of different tasks in the small world. The outcome is the realisation of an observable self-organisation effect in the robot swarm similar to that seen within other ecological systems such as ant and bee colonies as well as other social insects.
I was working on this project at the EPFL unviverity in Lausanne only 4 months as part of a PhD stage. I worked mainly with the Alice robot, developing and testing localization algorithms based on the projection of coded images (composed of black and white images) over two photodiodes placed in the robots.
Publications
- “Heterogenous Multi-configurable Chained Micro-robot for Exploration of Small Cavities”
A. Brunete, M. Hernando, J.E. Torres, E. Gambao. Automation in Construction, Volume 21, January 2012, Pages 184-198, ISSN 0926-5805. DOI: 10.1016/j.autcon.2011.06.003. Link - “A behaviour-based control architecture for heterogeneous modular, multi-configurable, chained micro-robots” A. Brunete, M. Hernando, E. Gambao, J.E. Torres. Robotics and Autonomous Systems, Vol. 60. No. 12. pp.1607-1624. December 2012. DOI: 10.1016/j.robot.2012.09.019. Link
- “Offline GA-based optimisation for heterogeneous modular multi-configurable chained micro-robots” A. Brunete, M. Hernando, E. Gambao. Transactions on Mechatronics, 2013, Volume: 18, Issue: 2, page(s): 578 – 585. DOI: 10.1109/TMECH.2012.2220560. Link
- “A Simulation Environment for Bio-Inspired Heterogeneous Chained Modular Robots”
A. Brunete, M. Hernando, E. Gambao. International Journal of Advanced Robotic Systems, 2014, 11:17. DOI: 10.5772/57324 Link - “Hammer: Robot Programming Interface for Common People” Alberto Brunete, Miguel Hernando and Ernesto Gambao. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018), 1-5 October 2018, pp. 5539-5539. Link
- “MDL: A Module Description Language for Chained Heterogeneous Modular Robots”. Brunete, A.; Hernando, M.; Gambao, E and Torres, J. Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO 2011)
- “Multi-Drive Control for In-Pipe Snakelike Heterogeneous Modular Micro-Robots”. Brunete, A.; Torres, J.; Hernando, M. and Gambao, E. (2007). Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO 2007)
- “A 2 DoF Servomotor-based Module for Pipe Inspection Modular Micro-robots”. Brunete, A.; Torres, J.; Hernando, M. and Gambao, E. (2006). Proceedings of the 2006 IEEE International Conference on Intelligent Robots and Systems (IROS).
- “Solar Powering with Integrated Global Positioning System for mm3 Size Robots”. Boletis, A.; Brunete, A.; Driesen, W. and Breguet, J. M. (2006). Proceedings of the 2005 IEEE International Conference on Intelligent Robots and Systems (IROS).
- “Drive Modules for Low Diameter Pipe Inspection Multiconfigurable Micro-robots”. Brunete, A.; Hernando, M. and Gambao, E. (2006). Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA)(Video+Poster)
- “Modular Multiconfigurable Architecture for Low Diameter Pipe Inspection Microrobots”. Brunete, A.; Hernando, M. and Gambao, E. (2005). Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA).
Comentarios recientes