
ROBOMesh
Multi Robot System for Gait Analysis
Continuation of project ROBOGait.
The general goal of the project is to develop a multi-robot and multi-sensor system (of at least two robots but with capacity for more), that can monitor a person while walking or running, that merges the data obtained by the robots into a single synchronized data set, that extracts the gait parameters needed for each medical or sports application (stride, inter-ankle distance, joint signals, etc.), that improves those parameters through artificial intelligence algorithms trained with data from ground truth systems like Vicon®, and that presents the results in a form useful for therapists or trainers.

Specific objectives:
- Design an algorithm for fusion and synchronization of data from several robots and sensors.
- Improve the quality of the signals obtained by using artificial intelligence with ground truth systems (Vicon®, Optitrack®, manual validation). Use of convolutional neural networks (CNN) and recurrent neural networks (RNN) based optimization (i.e. LSTM -long short-term memory- and Bi-LSTM).
- Implement a digital twin that allows testing of control algorithms without the need for patients. Development of an avatar to simulate patients.
- Design a solution based on a High Frequency (HF) and High Resolution (HR) static camera to obtain the ground truth for the outdoor system used for sports analysis.
- Design a new therapist-robot interface. The use of robots by non-technical personnel is not simple, so it is necessary to analyze how the interface should be to make it easy to use and not cause rejection among the medical population.
- Improve the robotic platforms developed in ROBOGait.

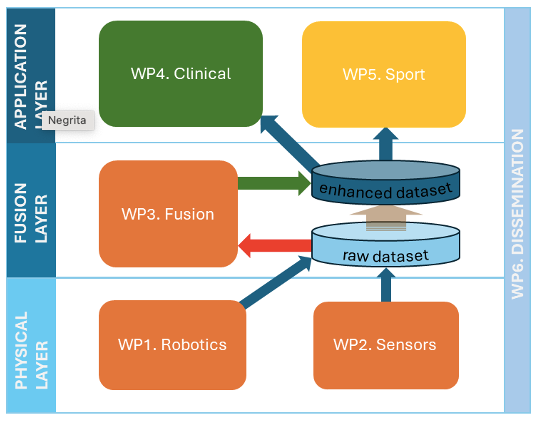
Workpackages
Comentarios recientes