ROBOGait SPORT prototype
RC based mobile platform intended to perform gait analysis in running conditions. Uses GNSS data in order to record a waypoint array it will navigate through during the gait experiment, with the help of a LIDAR sensor looking after unexpected obstacles or dangers. This robot wears a stereo depth sensor able to detect human skeletons even in outdoor environments by using 2 cameras in a similar way to how human eyes work. Due to the high speeds this robot will reach, a security system was implemented with which the operator can override control wirelessly in case of emergency.

Technical specifications
| Top speed | 15 m/s |
| Turn radius | 1.1 m |
| Capture range | 0.5 – 10 m |
| Dimensions (H x W x D) | 48 x 60 x 70 cm |
| Weight | 10 kg |
| Autonomy | 3 h |
| Power consumption | 15V 5A |
ROBOGait Indoor prototype
This prototype was designed entirely out of nowhere seeking best performance in clinical environment, focusing the gait analysis into disease diagnosis and monitoring. The implemented depth sensor, Azure Kinect, has shown better results for skeleton tracking than many other similar options, only in exchange for a quite shorter range of capture which doesn’t mean a problem at the indoor application it is intended for.

Technical specifications
| Speed | 1.5 m/s |
| Capture range | 1 – 6 m |
| Dimensions (H x W x D) | 43 x 27 x 32 cm |
| Weight | 4 kg |
| Load capacity | 7 kg |
| Autonomy | 2 h |
| Power consumption | 15V 3A |
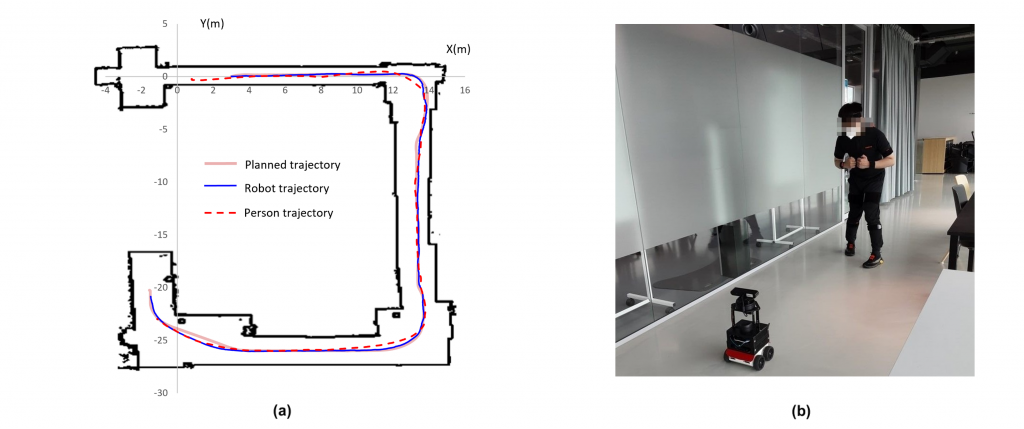
Pre-ROBOGait prototype
Modified version of Husarion’s ROSbot, using SLAM, mapping and location to planify flexible trajectories through some interest points previously chosen by the operator for the current gait experiment. Once running, it’s able to guide the subject from a programmed distance (usually 2.5m) while capturing their front image with the incorporated RGBD camera. 3D position of 19 body joints is extracted during the experiment, giving as result a .csv file with the desired data. Used as a validation protoype for checking if the project objectives were feasible

Technical specifications
| Top speed | 1.25 m/s |
| Rotational speed | 420 deg/s |
| Capture range | 0.6 – 8 m |
| Dimensions (H x W x D) | 44 x 23 x 20 cm |
| Weight | 5 kg |
| Load capacity | 10 kg |
| Autonomy | 1.5 – 5 h |
| Power consumption | 19V 4.74A |


Proyecto PID2020-118299RB-I00 financiado por MICIU/AEI/10.13039/501100011033