Inicio » Entradas etiquetadas como «publication»
Archivos de la etiqueta: publication
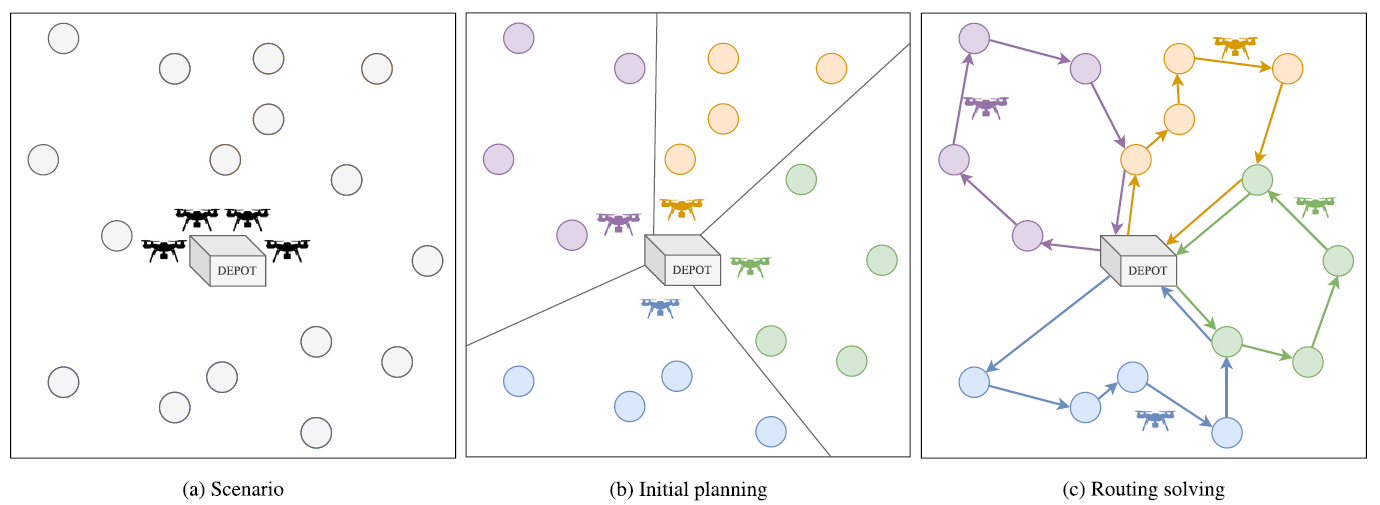
New paper published: “Solving Routing Problems for Multiple Cooperative Unmanned Aerial Vehicles using Transformer Networks”
Missions involving Unmanned Aerial Vehicles (UAVs) typically require the UAVs to travel to specific regions, perform designated tasks, and return to a predetermined base once all regions have been covered or when the UAVs’ batteries run low. Planning an efficient route is crucial for achieving optimal results, particularly when coordinating a team of UAVs. This paper presents a system that manages multiple cooperative UAVs by dividing the routing problem into two stages: initial planning and routing solving. During the initial planning stage, the system groups the regions to be visited into multiple clusters based on distance and assigns each cluster to a different UAV. In the routing solving stage, the system calculates the best route for each UAV, taking into account the clusters assigned during the initial planning stage and a variant of the Orienteering Problem that includes the concept of shared regions. This enables the UAVs to visit regions from other clusters, compensating for any suboptimal region clustering from the previous stage. The Orienteering Problem with shared regions is solved using the deep learning architecture Transformer and a deep reinforcement learning framework, which provides high-quality solutions faster than conventional optimization approaches. The system’s benefits are demonstrated through extensive results and comparisons with other Combinatorial Optimization algorithms in cooperative and non-cooperative scenarios.
Read full paper in [https://authors.elsevier.com/sd/article/S0952197623002695]