Inicio » publications
Archivos de la categoría: publications
New paper published: “Visual Parking Occupancy Detection Using Extended Contextual Image Information Via a Multi-Branch Output ConvNeXt Network”
With the development of society, transportation has become a crucial aspect of our daily lives, resulting in a significant increase in the number of vehicles on the roads. As a result, finding available parking slots in metropolitan areas can be a daunting task, leading to a higher risk of accidents and carbon emissions, and negatively impacting the driver’s health. In this context, technological solutions for parking management and real-time monitoring have become crucial to streamline the parking process in urban areas.
This study proposes a new computer vision-based system that utilizes color imagery processed by an innovative deep learning algorithm to identify vacant parking spaces in challenging scenarios. The system utilizes a multi-branch output neural network that maximizes contextual image information to determine the occupancy of each parking space. Unlike existing approaches that only use a neighborhood around each slot, every output infers the occupancy of a specific parking space using all the input image information. This approach makes the system very robust to changes in illumination conditions, various camera perspectives, and mutual occlusions between parked cars.
An extensive evaluation of the proposed system has been conducted using several public datasets, which has shown that the system outperforms existing approaches. The innovative approach of this system can significantly improve the parking experience for drivers, reduce the risk of accidents and carbon emissions, and positively impact the overall health and well-being of urban communities.
Read full paper in [https://www.mdpi.com/1424-8220/23/6/3329/htm]

New paper published: “Solving Routing Problems for Multiple Cooperative Unmanned Aerial Vehicles using Transformer Networks”
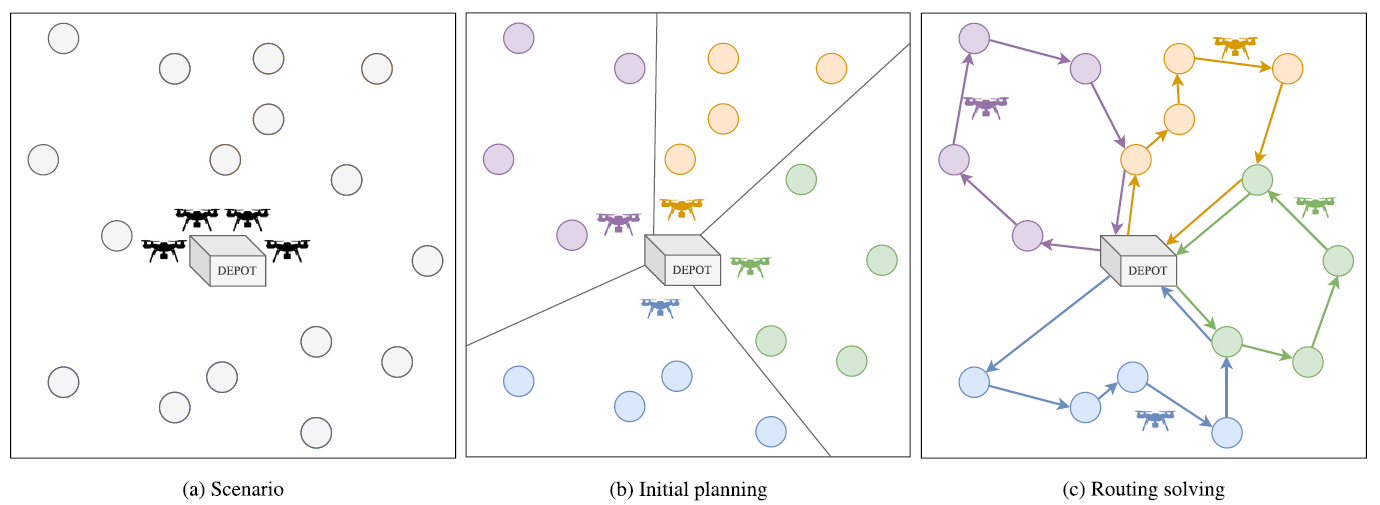
Missions involving Unmanned Aerial Vehicles (UAVs) typically require the UAVs to travel to specific regions, perform designated tasks, and return to a predetermined base once all regions have been covered or when the UAVs’ batteries run low. Planning an efficient route is crucial for achieving optimal results, particularly when coordinating a team of UAVs. This paper presents a system that manages multiple cooperative UAVs by dividing the routing problem into two stages: initial planning and routing solving. During the initial planning stage, the system groups the regions to be visited into multiple clusters based on distance and assigns each cluster to a different UAV. In the routing solving stage, the system calculates the best route for each UAV, taking into account the clusters assigned during the initial planning stage and a variant of the Orienteering Problem that includes the concept of shared regions. This enables the UAVs to visit regions from other clusters, compensating for any suboptimal region clustering from the previous stage. The Orienteering Problem with shared regions is solved using the deep learning architecture Transformer and a deep reinforcement learning framework, which provides high-quality solutions faster than conventional optimization approaches. The system’s benefits are demonstrated through extensive results and comparisons with other Combinatorial Optimization algorithms in cooperative and non-cooperative scenarios.
Read full paper in [https://authors.elsevier.com/sd/article/S0952197623002695]
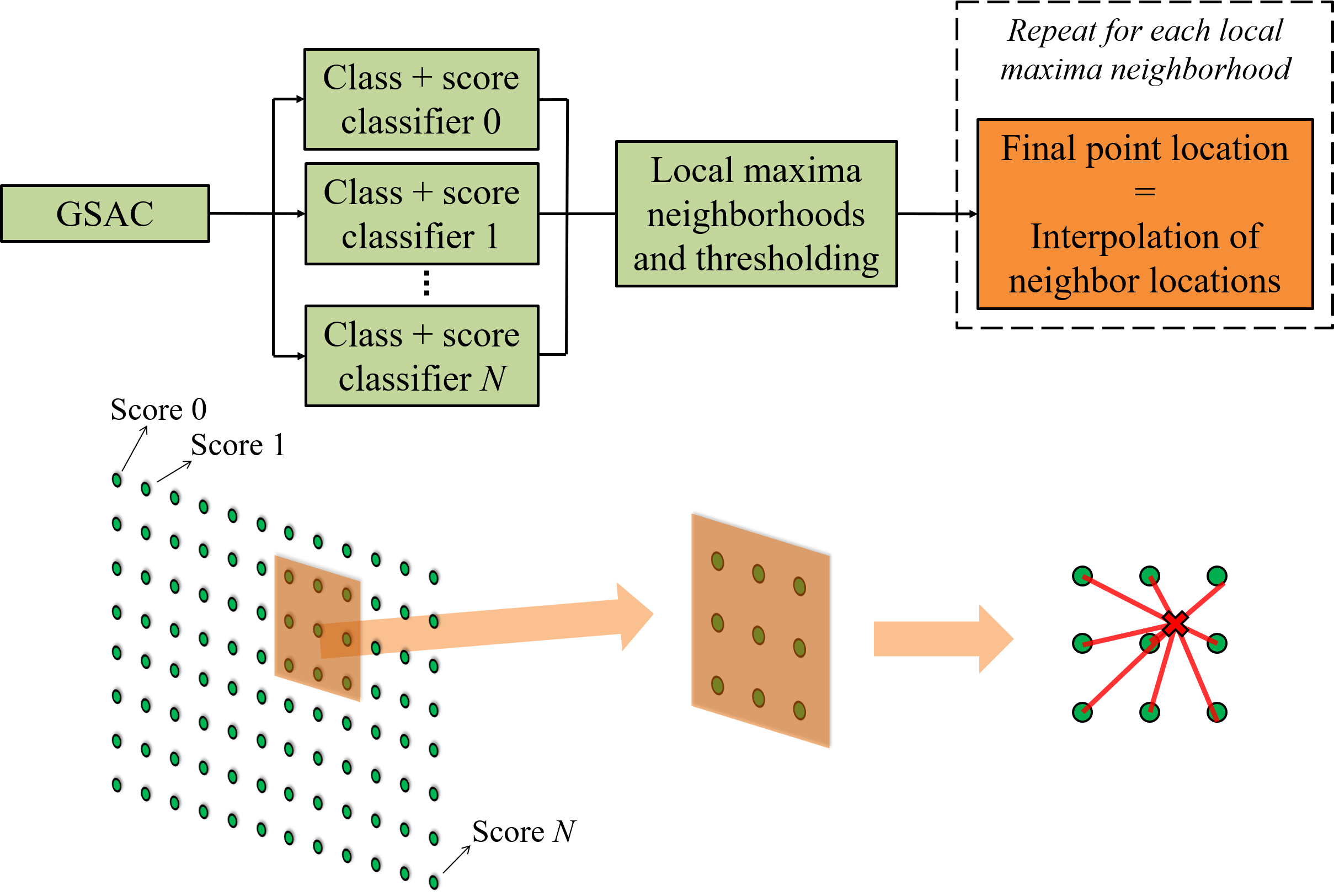
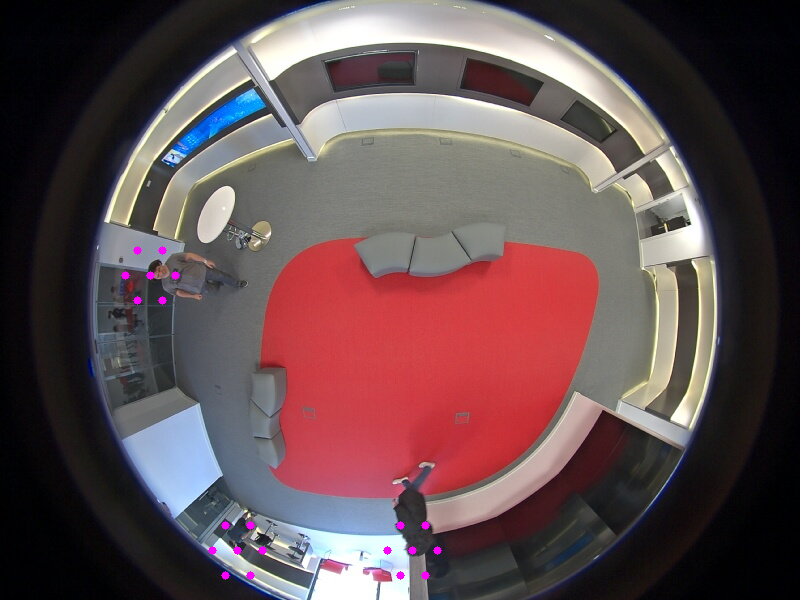
New publication “Robust people indoor localization with omnidirectional…”
Our paper Robust people indoor localization with omnidirectional cameras using a Grid of Spatial-Aware Classifiers has been accepted in Signal Processing: Image Communication.
See also our database PIROPO.
Ethics in research & publication