Inicio » UAV-UGV collaboration
Archivos de la categoría: UAV-UGV collaboration
Landing on UGV

In our department we have been investigating in the last years how to deploy and use Unmanned Ground Vehicles (UGVs) in disaster scenarios, in which a human being, searching for survivors, might be at risk [1]. Frequently, the orography is complex (take as example a city after an earthquake), there are obstacles on the terrain or an aerial point of view is required. In those cases an Unmanned Aerial Vehicle (UAV) is probably needed, although its lack of range, endurance and payload capability are important drawbacks.
This is why teams of heterogeneous robots (a UGV and a UAV) might be a suitable solution [2], taking advantage of the properties of both robots. To improve the endurance of the UAV, the UGV can carry it and supply energy, whereas the UAV takes-off to overcome terrain obstacles and to provide a point of view from above.
One of our degree student coworkers, Pablo Rodriguez Palafox, has been working on developing an autonomous system to take-off from the UGV, track and follow it, and finally land on it. His work was based on previous investigations carried out also in our department [3].He presented his work as Bachelor Thesis. His work is a first stage to develop a more complex and autonomous system, that our group will use not only in disaster scenarios, but also in other tasks we are working on, such as in environmental variables monitoring in greenhouses [4].
He used an AR. Drone 2.0 as UAV and a Robotnik Summit XL as UGV, on which he placed a red landing platform. Using Open CV libraries, we was able to detect that red platform and locate its centroid. To control the following and landing process, he used firstly an adaptive PID controller, and afterwards he improved it using a Kalman filter to predict the future position of the UGV. He also included a recobery mode, in which if the quadcopter fails to land or loses the platform, flies up and tries to locate again the UGV.
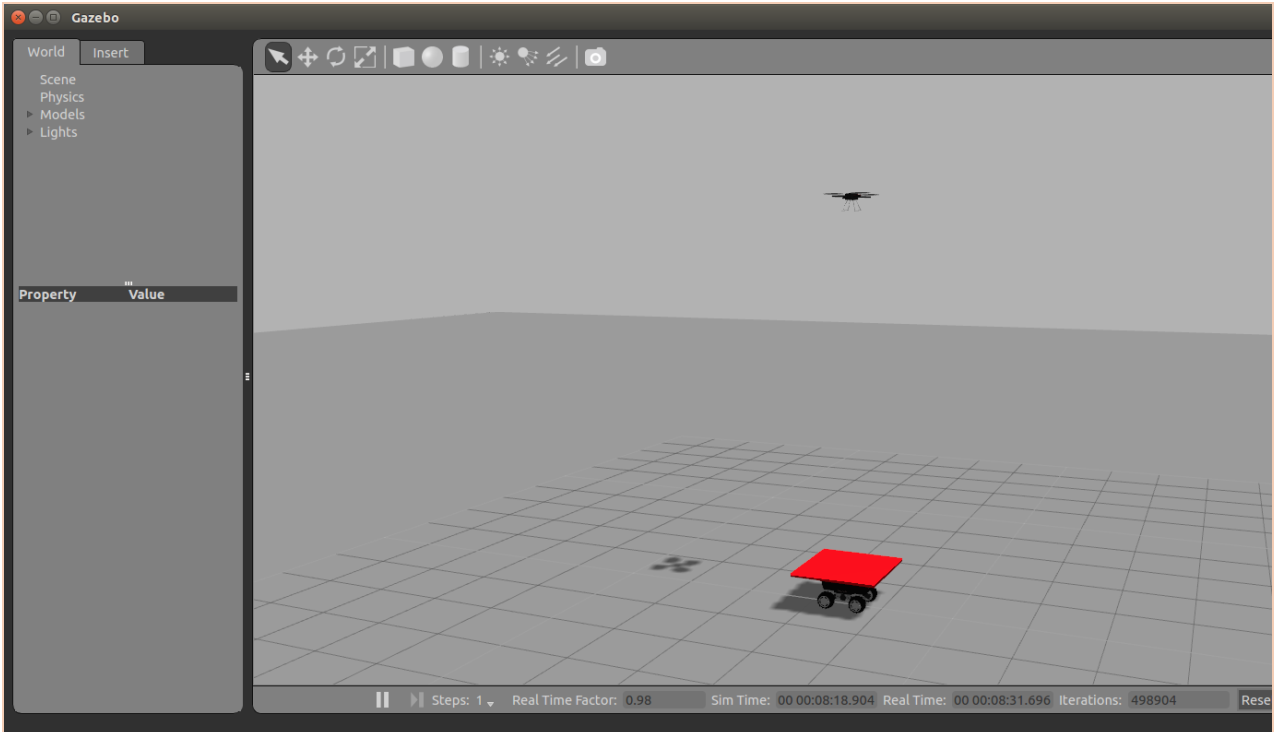
The algorithms were tested in Gazebo and finally in the real platforms. He achieved remarkable results, with a very low failure rate.
As future lines of development, we consider using a more advanced UAV available in the department, such as the AscTec Pelican, equipped with a camera with better resolution. We will be then able to use different visual markers for the landing platform, in order to achieve a more accurate relative positioning.
This video shows the results of the test carried out:
[1] – Murphy, R. R. (2014). Disaster robotics. MIT press.
[2] – Balakirsky, S., Carpin, S., Kleiner, A., Lewis, M., Visser, A., Wang, J., & Ziparo, V. A. (2007). Towards heterogeneous robot teams for disaster mitigation: Results and performance metrics from robocup rescue. Journal of Field Robotics, 24(11‐12), 943-967.
[3] – M. Garzon I. Baira and A. Barrientos. Detecting, Localizing and Following Dynamic Objects with a Mini-UAV. RoboCity16 Open Conference on Future Trends in Robotics, May 2016. III, 2.
[4] – Roldán, J. J., Garcia-Aunon, P., Garzón, M., de León, J., del Cerro, J., & Barrientos, A. (2016). Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses. Sensors, 16(7), 1018.

About Jaime Del Cerro
Agro-robótica

El término "Agrorobótica" está empezando a usar para hacer referencia a las disciplinas encaminadas al uso de sistemas robotizados en la agricultura. Estos incluyen maquinaria agrícola robotizada, robos móviles específicamente diseñados para tareas agrícolas en experiores o bajo cubierta, Robots aéreos o "Drones" (actualmente denominados RPAS)
Incluso, en algunas universidades europeas, están apareciendo cátedras en Agro-robótica, buscando dar una formación específica en esta disciplina
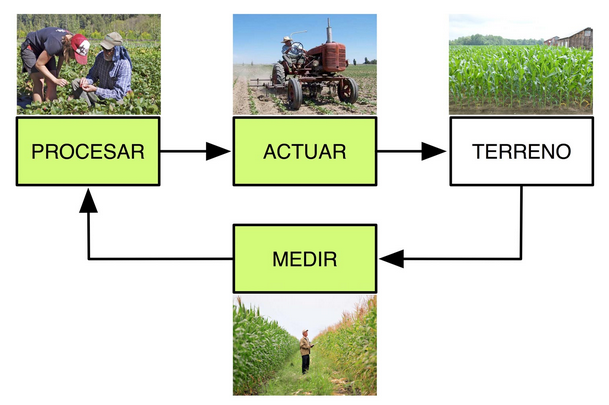
Desde el enfoque de la ingeniería de control , la Agro-robótica es una herramienta para aplicar el ciclo básico de control a la producción agrícola
En el Grupo de Robótica y Cibernética, trabajamos en Robótica Agrícola de exteriores e invernaderos desde hace 10 años, tanto con desarrollos basados en robótica aérea como en robótica móvil o combinando ambas
.
Estos son algunos ejemplos:
-
Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses
-
Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses
Comentarios recientes