Inicio » UAV
Archivos de la categoría: UAV
Tratamiento y visualizacion de datos urbanos obtenidos por un enjambre de drones
¿Ya visteis el episodio 3×06 de Black Mirror ("Odio Nacional") donde un enjambre de Autonomous Drone Insects (ADI) hacen de las suyas?

|
|
No temais, "aún" es ciencia ficción, pero en el Robcib llevamos tiempo trabajando en como gestionar estos enjambres y la información que podrían capturar sobre el estado de la ciudad. Monitorización de tráfico, gases, partículas en supensión, concentraciones de personas, acumulación de basuras,… todos estos datos podrian ser recogidos por montones de drones con comportamientos muy simples (acudir al lugar de mayor concetración de polen, alejarse de los puntos mas calientes, seguir objetos en movimiento de un color determinado,..). Cada uno de ellos daría poca información, pero la suma de lo que dan todos, adecuadamente tratada y visualizada, permitiría monitorizar el estado de la ciudad de una manera detallada.
No existen aún esos ADI de Black Mirror. Ni siquiera drones con el tamaño y autonomía de vuelo necesarios. Pero podemos construir una ciudad virtual , con sus horarios y rutinas diarias, clima, tráfico, etc. y hacer volar sobre ella un enjambre virtual que capta y transmite información básica.
Eso es SWARM CITY (la ciudad enjambre) sobre la que trabajan varios de los TFG, TFM y tesis del Robcib

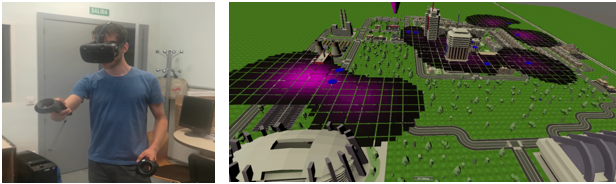
Javier Real, en concreto, ha presentado su TFG "Tratamiento y visualización de datos urbanos obtenidos por un enjambre de drones" en el que se desarrollan los algoritmos para agrupar la abundante información procedente de todos los drones a lo largo del tiempo, sintetizarla (mediante Procesos Gaussianos), descubrir aquellas situaciones que pueden ser de especial interés para el control de la ciudad (mediante Redes Neuronales) y localizarlas en el mapa de esta y mostrar todo ello al usuario mediante un Entorno inmersivo 3D de Realidad Virtual.
Robótica en invernaderos
Una de nuestras líneas de investigación es la utilización de robots para la monitorización ambiental de los invernaderos. Nuestro objetivo es desarrollar un sistema formado por varios robots terrestres y aéreos capaz de medir de forma continuada variables como la temperatura, la humedad, la iluminación o la concentración de CO2. Este sistema ha de ser robusto, puesto que debe cubrir todo el invernadero con una cierta periodicidad y operar 24 horas al día y 365 días al año, pero también flexible, ya que debe ser capaz de reaccionar a las medidas anómalas y buscar el origen de las mismas. En esta entrada vamos a hacer un repaso cronológico a esta línea de investigación destacando los principales resultados que hemos alcanzado.

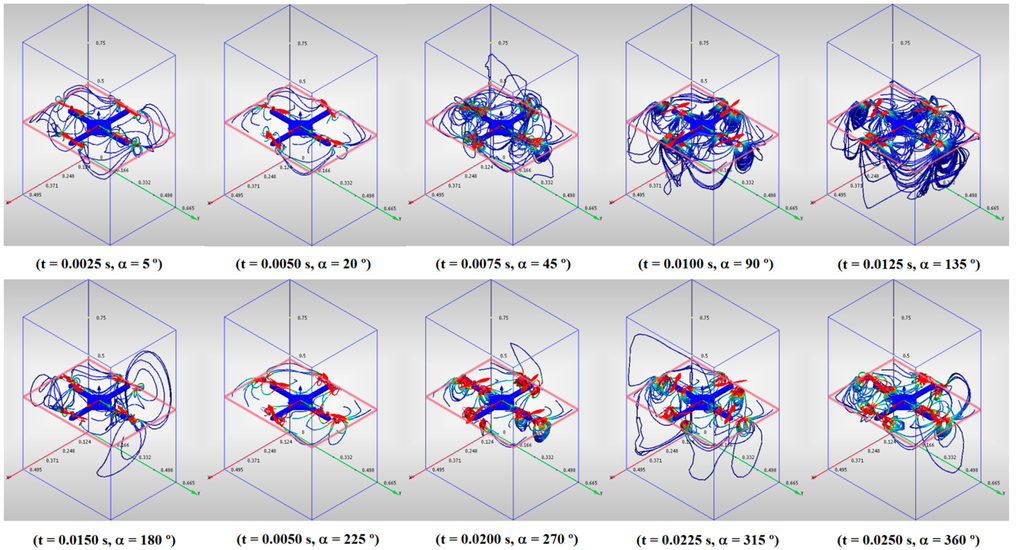
Esta línea comenzó en 2014 con el Trabajo Final de Máster titulado "Sistema sensorial embarcado en un mini-UAV para la medida de las variables ambientales de un invernadero" (desarrollado por el que os escribe y disponible aquí). Este trabajo exploraba la posibilidad de equipar un pequeño quadrotor con sensores de temperatura, humedad, iluminación y concentración de CO2 para tomar medidas en invernaderos. El trabajo se centró en dos objetivos: por un lado, desarrollar el sistema sensorial y, por el otro, plantear el sistema de navegación. En cuanto al primero, se determinó la posición idónea para los sensores, aquella donde la influencia de los flujos de aire de los rotores es mínima, mediante una serie de simulaciones CFD y experimentos con el quadrotor. En cuanto al segundo, se planteó un sistema de navegación autónoma basada en la visión de marcas en el suelo: una línea para seguir la ruta y unos cuadrados para detenerse y tomar medidas.
En febrero de 2015 publicamos en la revista Sensors la parte de este trabajo relativa al diseño del sistema sensorial y los experimentos realizados en un invernadero:
J.J. Roldán, G. Joossen, D. Sanz, J. del Cerro and A. Barrientos. “Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses”. Sensors, 15(2), 3334-3350. 2015. Artículo
Este trabajo tuvo una cierta repercusión en los medios y, entre otros sitios, apareció en RTVE, madri+d, sinc, El Economista o ABC.
La línea de investigación continuó durante el curso 2014-2015 con un Trabajo Final de Grado titulado "Sistema sensorial sobre un robot móvil para la medida de las propiedades del suelo de un invernadero" y desarrollado por Alberto Ruiz-Larrea Guillén. En este trabajo se empleaba un robot terrestre de mediano tamaño, en lugar del pequeño robot aéreo, con el objetivo de medir la temperatura y la humedad del suelo. Este trabajo sirvió para consolidar la idea de que un equipo de robots podía ser más eficiente que un solo robot en un invernadero, ya que cada robot puede realizar las tareas que se le dan mejor.
En los últimos meses de 2015 estuvimos en la conferencia ROBOT2015 en Lisboa presentando los resultados de este trabajo:
A. Ruiz-Larrea, J.J. Roldán, M. Garzón, J. del Cerro and A. Barrientos. "A UGV approach to measure the ground properties of greenhouses". ROBOT2015: Second Iberian Robotics Conference. 2015. Artículo
Y también participamos en la Noche de los Investigadores 2015 con un póster que resumía el estado de la línea de investigación:

Ya en 2016 dimos el salto de utilizar robots aéreos o terrestres por separado a emplear un equipo de robots. El planteamiento era aprovechar las cualidades de cada robot para que desempeñe las tareas que se le dan mejor. El UGV puede aprovechar su autonomía y robustez para recorrer el invernadero cargando con su compañero y tomando medidas, mientras que el UAV puede aprovechar su velocidad y agilidad para intervenir cuando su compañero encuentra obstáculos o surge la necesidad de medir a diferentes alturas. En el vídeo se puede ver la estrategia del equipo: primero el UGV es teleoperado para realizar un mapa del invernadero, luego este robot navega de forma autónoma tomando medidas y, cuando se detecta un obstáculo en el camino o una anomalía en las medidas, el UAV interviene para continuar con la monitorización.
En junio de 2016 publicamos en la revista Sensors estos últimos trabajos y unos experimentos realizados en un invernadero de prácticas de la E.T.S.I. Agrónomos de la Universidad Politécnica de Madrid:
J.J. Roldán, P. Garcia-Aunon, M. Garzón, J. de León, J del Cerro and A. Barrientos. “Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses”. Sensors, 16(7), 1018. 2016. Artículo
Nuestros próximos pasos van a ir encaminados hacia el funcionamiento continuo del equipo en un invernadero productivo y la comparación de su rendimiento con el de otras alternativas como las redes de sensores. Por su parte, los principales retos a los que nos enfrentamos tienen que ver con la autonomía del sistema multi-robot y la navegación autónoma del robot aéreo en el invernadero.

About Juan Jesús Roldán Gómez
- Web |
- More Posts(1)
Agro-robótica

El término "Agrorobótica" está empezando a usar para hacer referencia a las disciplinas encaminadas al uso de sistemas robotizados en la agricultura. Estos incluyen maquinaria agrícola robotizada, robos móviles específicamente diseñados para tareas agrícolas en experiores o bajo cubierta, Robots aéreos o "Drones" (actualmente denominados RPAS)
Incluso, en algunas universidades europeas, están apareciendo cátedras en Agro-robótica, buscando dar una formación específica en esta disciplina
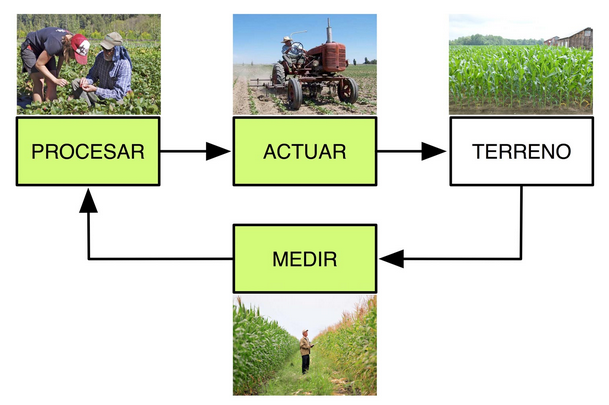
Desde el enfoque de la ingeniería de control , la Agro-robótica es una herramienta para aplicar el ciclo básico de control a la producción agrícola
En el Grupo de Robótica y Cibernética, trabajamos en Robótica Agrícola de exteriores e invernaderos desde hace 10 años, tanto con desarrollos basados en robótica aérea como en robótica móvil o combinando ambas
.
Estos son algunos ejemplos:
-
Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses
-
Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses
Comentarios recientes