Inicio » Realidad Vitual y Aumentada
Archivos de la categoría: Realidad Vitual y Aumentada
MACH-I . Un Robot como una trompa de elefante
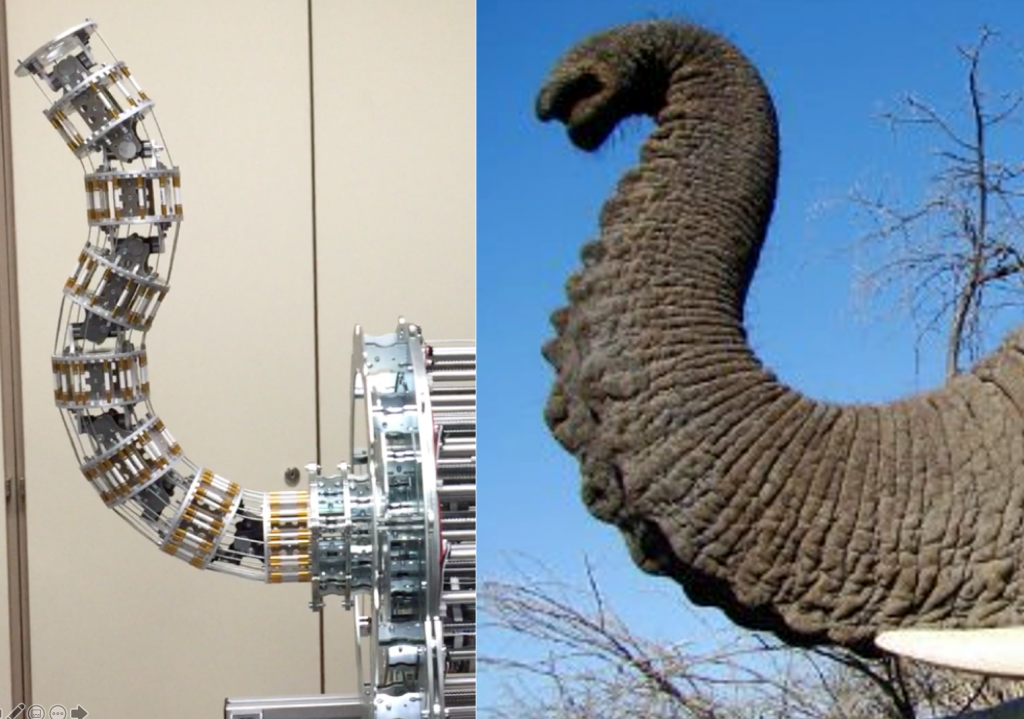
La trompa de un elefante es su apendice diestro. Con una capidad de maniobra increible es capaz de introducrise por lugares confinados y manipular objetos de diferentes formas.
Hacer un robot similar a la trompa de un elefante es tarea de la Robótica Bioinspirada basada en elementos y actuadores blandos (“Soft Robotics”).
Aún lejos de igualar sus prestaciones, los robots manipuladores hiperredundantes pueden lograr capacidades de movilidad que, cuanto menos, recuerdan a la referida trompa.
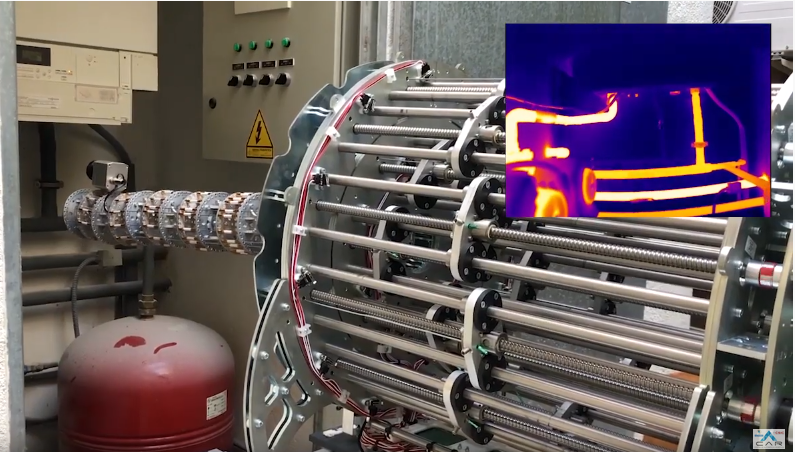
MACH I es el resultado de un Trabajo de fin de máster (de súper Ivan Rodríguez) realizado en el grupo de investigación de Robótica y Cibernética, dentro del proyecto del plan nacional PRIC (DPI2014-56985-R Protección robotizada de infraestructuras críticas). Entre los objetivos del mismo, se incluía el construir un robot hiper redundante funcional, adecuado para inspeccionar lugares muy confinados y realizar en ellos ciertas tareas de manipulación.

21 motores mueven, mediante cables, 7 segmentos conectados mediante juntas cardan. Al no tratarse de un robot serie, los movimentos de los motores deben estar sincronizados con mucha precisión. Tirar de un cable implica soltar de otros en la medida adecuada.
https://youtu.be/XbLFA1m5bRo
Tras la construcción del robot , el uso de la teleoperación y de la realidad aumentada aportada por Juan Jesús y Andrés , junto con algoritmos de cálculo de la cinematica inversa para robots hiper-redundantes y planificación de trayectorias ideados por Andrés, permiten sacar todo el partido al robot.
En la actualidad seguimos mejorando las prestaciones (David Marquez) e ideando nuevas soluciones constructivas (Elena Muñoz y Jaime Bravo)
Tratamiento y visualizacion de datos urbanos obtenidos por un enjambre de drones
¿Ya visteis el episodio 3×06 de Black Mirror ("Odio Nacional") donde un enjambre de Autonomous Drone Insects (ADI) hacen de las suyas?

|
|
No temais, "aún" es ciencia ficción, pero en el Robcib llevamos tiempo trabajando en como gestionar estos enjambres y la información que podrían capturar sobre el estado de la ciudad. Monitorización de tráfico, gases, partículas en supensión, concentraciones de personas, acumulación de basuras,… todos estos datos podrian ser recogidos por montones de drones con comportamientos muy simples (acudir al lugar de mayor concetración de polen, alejarse de los puntos mas calientes, seguir objetos en movimiento de un color determinado,..). Cada uno de ellos daría poca información, pero la suma de lo que dan todos, adecuadamente tratada y visualizada, permitiría monitorizar el estado de la ciudad de una manera detallada.
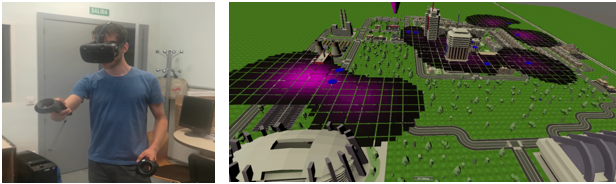
No existen aún esos ADI de Black Mirror. Ni siquiera drones con el tamaño y autonomía de vuelo necesarios. Pero podemos construir una ciudad virtual , con sus horarios y rutinas diarias, clima, tráfico, etc. y hacer volar sobre ella un enjambre virtual que capta y transmite información básica.
Eso es SWARM CITY (la ciudad enjambre) sobre la que trabajan varios de los TFG, TFM y tesis del Robcib

Javier Real, en concreto, ha presentado su TFG "Tratamiento y visualización de datos urbanos obtenidos por un enjambre de drones" en el que se desarrollan los algoritmos para agrupar la abundante información procedente de todos los drones a lo largo del tiempo, sintetizarla (mediante Procesos Gaussianos), descubrir aquellas situaciones que pueden ser de especial interés para el control de la ciudad (mediante Redes Neuronales) y localizarlas en el mapa de esta y mostrar todo ello al usuario mediante un Entorno inmersivo 3D de Realidad Virtual.
SISTEMA DE ADIESTRAMIENTO EN TAREAS DE ENSAMBLADO MEDIANTE REALIDAD VIRTUAL Y MINERÍA DE PROCESOS
Elena Crespo ha finalizado su TFG titulado "Sistema de Adiestramieto en Tareas de Ensamblado Mediante Realidad Virtual y Minería de Procesos
|
|
En el se da una efeciente solución al problema de la gestión y transmisión del conocimiento relativo a las labores de ensamblado
Imaginemos una cadena de montaje en la que operadores con experiencia realizan de manera eficiente el ensamblado de conjuntos a partir de piezas mas simples u otros subconjuntos. Cada uno de estos operadores ha llegado a optimizar la secuencia en la que efectúa el montaje en base a muchas horas de trabajo en la línea.
Si un nuevo trabajador se incorpora a la línea debe ser adiestrado por los antiguos, cada uno con sus propias preferencias, consumiendo tiempo de ambos y relentizando la cadena de montaje.
Además, si alguno de los trabajadores expertos dejase ese puesrto de trabajo, se llevaría con él una experiencia que sería dificil de extraer y documentar
El trabajo desarrollado por Elena aborda esta situación mediante el uso de 2 herramientas: La Minería de Procesos y la Realidad Virtual

En concreto: los trabajadores expertos transfieren su experiencia a un sistema informático de manera automática. Para ello realizan sus tareas sobre un sistema de Realidad Virtual (hacerlo con el sistema real implicaría la captación de sus acciones mediante visión por computador, por ejemplo, y una interpretación de las acciones mediante alguna técnica de IA. Ambos problemas son complejos y pueden ser obviados con el uso de la RV).
El sistema registra las acciones que realizan los operarios expertos para, mediante técnicas de Minería de Procesos, inferir la secuencia de acciones y optimizar estas .
Tras ello, el conocimiento del experto adquirido en base a la experiencia, es sintetizado, optimizado y transferido al sistema. Esta listo entonces para ser usado en el entrenamiento del operador aprendiz.
Este hace de nuevo uso de la Realidad Virtual para entrenarse en la tarea. El sistema le da para ello diferentes niveles de ayuda, que van desde guiarle paso a paso hasta solo monitorizarle e indicarle los posibles errores.
El sistema ha sido evaluado con 64 experimentos tanto mediante medidas objetivas para medir su eficacia, como con test como el NASA TLX para evaluar la carga mental del trabajador aprendiz con este tipo de sistemas.
En estos vídeos podeis ver ambas fases, la captación del conocimiento del operario experto y la guia en el proceso de aprendizaje del operador aprendiz.
Un resumen de su trabajo se puede leer en http://oa.upm.es/49247/
Y en breve estará accesible la memoria de su trabajo y esperamos algo mas…..
Elena ha obtenido un 9,9 en su TFG, para nosotros tiene la MH 🙂
Comentarios recientes